George Hotz, the first person to hack the iPhone, built a self-driving car in a month, declined a personal job offer from Teslas Elon Musk.
And pursues his Linux Based Self-Driving Autonomous Car Project.

George Hotz, the first person to hack the iPhone, built a self-driving car in a month, declined a personal job offer from Teslas Elon Musk.
And pursues his Linux Based Self-Driving Autonomous Car Project.

Bei den Technologiegesprächen in Alpbach im August hat Infrastrukturminister Alois Stöger „Teststrecken“ für autonom fahrende Autos angekündigt, am Montag hat die Steiermark offiziell aufgezeigt, diese Testregion werden zu wollen. „Wir haben in der Steiermark die perfekten Voraussetzungen dafür, die österreichische Modellregion zu werden“, sagt Franz Lückler, CEO des ACstyria Autoclusters. Gemeinsam mit der Politik und der Wirtschaft wurde offiziell das „Projekt Z“ gestartet, bei dem die Steiermark zur Teststrecke werden will. „Es gibt 220 Unternehmen, die im AutoCluster zusammengefasst sind, von AT&S, Magna, AVL-List, NXP, ams bis hin zu Infineon. Sie alle leisten bereits heute einen wertvollen Beitrag für die Zukunft der Mobilität.“ Das autonome Fahren könne zu einem Umsatzturbo für die steirischen Zulieferbetriebe werden.
, ACstyria-CEO Franz Lückler, Wirtschaftslandesrat Christian Buchmann (v. l. hockend) - Foto: ACstyria/Kanizaj")
Schützenhilfe hat der ACStyria Autocluster von Wirtschaftslandesrat Christian Buchmann bekommen, der bereits an das Infrastrukturministerium herangetreten ist: „Die Steiermark hat schon früh erkannt, dass Mobilität eine spannende Thematik ist“, so Buchmann. „50.000 Menschen sind bei uns allein im Mobilitätsbereich beschäftigt, die Wertschöpfung beträgt 14,5 Milliarden Euro.“ Hinzu komme, dass dadurch eine enge Zusammenarbeit mit außeruniversitären und universitären Instituten, allen voran der TU Graz, bestehe.
Die Wirtschaft steht freilich hinter dem Projekt Z. „Wir sind schon seit Jahren aktiv in diesem Feld unterwegs“, sagt AT&S-Generaldirektor Andreas Gerstenmayer, der auch Vorsitzender des Forschungsrats in der Steiermark. „Wir arbeiten mit den bedeutendsten Zulieferern zusammen und sind bei der Entwicklung von Assistenz-, Fahrzeugerkennungs-Systemen oder auch der Car2Car-Communication beteiligt.“ Doch neben Teststrecken fordert Gerstenmayer vor allem eines, „eine gesellschaftliche Akzeptanz. Die technischen Lösungen gibt es ja schon, aber die Ängste in der Bevölkerung müssen abgebaut werden.“ Autonomes Fahren bringe mehr Sicherheit, und das müsse man den Menschen klar machen, denn für 90 Prozent aller Verkehrsunfälle sei der Mensch verantwortlich. Man müsse die Menschen von den positiven Seiten der Technologie überzeugen, dürfe aber freilich nicht auf die heiklen Themen wie Datennutzung und Datensicherheit vergessen.
„Europa muss bei diesem Thema auch vorne dabei sein“, sagt Magna-Vizepräsident Gerd Brusius, der sich einen raschen Start des Projekt Z wünscht. „Wir brauchen die Möglichkeit, autonomes Fahren im rechtlichen Rahmen hier zu testen, um die Wettbewerbsfähigkeit zu erhalten.“ Es gäbe ohnehin noch sehr viele Themen, die in diesem Zusammenhang geklärt werden müssen, von Gesetzen bis hin zu versicherungstechnischen Fragen. Brusius: „Tatsache ist, dass diese Technologie die Zukunft des Automobils drastisch verändern wird.“

In 1942, Isaac Asimov introduced three laws of robotics in his short story “Runaround”.
They were as follows:
He later added a fourth law, the zeroth law:
0. A robot may not harm humanity, or, by inaction, allow humanity to come to harm.
Though fictional, they provide a good philosophical grounding of how AI can coexist with society. If self driving cars, were to follow them, we’re in a pretty good spot right? (Let’s leave aside the argument that self-driving cars lead to loss of jobs of taxi drivers and truck drivers and so should not exist per the 0th/1st law)
However, there’s one problem which the laws of robotics don’t quite address.
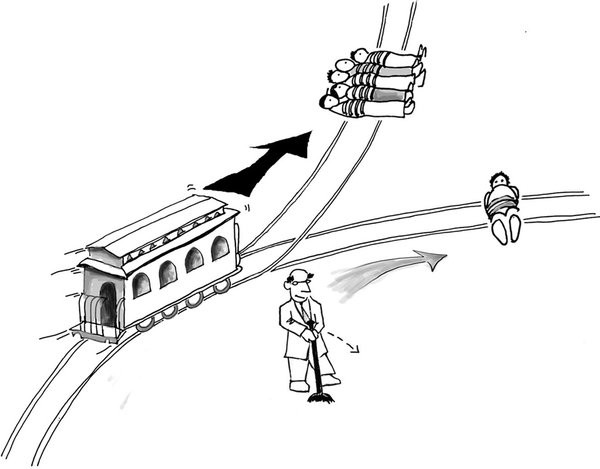
It’s a famous thought experiment in philosophy called the Trolley Problem and goes as follows:
Say a trolley is heading down the railway tracks. Ahead, on the tracks are five people tied down who cannot move. The trolley is headed straight for them, and will kill them. You are standing some distance ahead, next to a lever. If you pull this lever, the trolley switches to a different set of tracks, on which there is one person. You have two options:
1. Do nothing, in which case the trolley kills the 5 people on the main track.
2. Pull the lever, in which case the trolley changes tracks and kills the one person on the side track.
What should you do?
It’s not hard to see how a similar situation would come up in a world with self-driving cars, with the car having to make a similar decision.
Say for example a human-driven car runs a red light and a self-driving car has two options:
What should the car do?
From a utilitarian perspective, the answer is obvious: to turn right (or “pull the lever”) leading to the death of only one person as opposed to five.
Incidentally, in a survey of professional philosophers on the Trolley Problem, 68.2% agreed, saying that one should pull the lever. So maybe this “problem” isn’t a problem at all and the answer is to simply do the Utilitarian thing that “greatest happiness to the greatest number”.
But can you imagine a world in which your life could be sacrificed at any moment for no wrongdoing to save the lives of two others?
Now consider this version of the trolley problem involving a fat man:
As before, a trolley is heading down a track towards five people. You are on a bridge under which it will pass, and you can stop it by putting something very heavy in front of it. As it happens, there is a very fat man next to you — the only way for you to stop the trolley is to push him over the bridge and onto the track, killing him to save five people. Should you do it?
Most people that go the utilitarian route in the initial problem say they wouldn’t push the fat man. But from a utilitarian perspective there is no difference between this and the initial problem — so why do they change their mind? And is the right answer to “stay the course” then?
Kant’s categorical imperative goes some way to explaining it:
Act only according to that maxim whereby you can, at the same time, will that it should become a universal law.
In simple words, it says that we shouldn’t merely use people as means to an end. And so, killing someone for the sole purpose of saving others is not okay, and would be a no-no by Kant’s categorical imperative.
Another issue with utilitarianism is that it is a bit naive, at least how we defined it. The world is complex, and so the answer is rarely as simple as perform the action that saves the most people. What if, going back to the example of the car, instead of a family of five, inside the car that ran the red light were five bank robbers speeding after robbing a bank. And sat in the other car was a prominent scientist who had just made a breakthrough in curing cancer. Would you still want the car to perform the action that simply saves the most people?
So may be we fix that by making the definition of Utilitarianism more intricate, in that we assign a value to each individuals life. In that case the right answer could still be to kill the five robbers, if say our estimate of utility of the scientist’s life was more than that of the five robbers.
But can you imagine a world in which say Google or Apple places a value on each of our lives, which could be used at any moment of time to turn a car into us to save others? Would you be okay with that?
And so there you have it, though the answer seems simple, it is anything but, which is what makes the problem so interesting and so hard. It will be a question that comes up time and time again as self-driving cars become a reality. Google, Apple, Uber etc. will probably have to come up with an answer. To pull, or not to pull?
Lastly, I want to leave you another question that will need to be answered, that of ownership. Say a self-driving car which has one passenger in it, the “owner”, skids in the rain and is going to crash into a car in front, pushing that car off a cliff. It can either take a sharp turn and fall of the cliff or continue going straight leading to the other car falling of the cliff. Both cars have one passenger. What should the car do? Should it favor the person that bought it — its owner?
Further Reading:

SAN FRANCISCO — The world is one step closer to the day when people can, in good conscience, drive to work while sipping coffee, texting with a friend and working on a laptop computer.
On Friday, Google announced that sometime this summer several prototype versions of its self-driving cars are set to hit the streets of Mountain View, Calif., the search giant’s hometown. The move is still just another round of testing but it is a significant step toward a pilot program in which regular consumers could ride in self-driving cars.
Google has long been testing its self-driving car technology with a fleet of Lexus sport utility vehicles that have driven about a million miles on public roads, and that continue to put in 10,000 miles each week.
Traditional automakers are also pushing the envelope of driverless tech with on-the-road testing of their own autonomous prototypes, and the industry predicts that by 2020 those dreams could come true.
Getting there is now much more about software than hardware. The systems of radar, lasers and cameras currently used by Google and automakers have grown so sophisticated that the vehicles can easily monitor the road in all directions — even beyond what the eye can see. The tough part is figuring out what to do with all that information.
In essence, the cars need an electronic brain that knows how to drive in a world where human drivers, as well as pedestrians and bicyclists, often do unpredictable things.
They also need to understand regional differences. Drivers in Boston, for instance, often behave differently than those in Atlanta or Los Angeles, where unspoken rules of the road and cultural cues can vary.
City environments are particularly challenging, and require software with much more flexibility and power. That’s one of the reasons Google (and its rival, Apple) hope their software acumen can help them solve the puzzle. And now that Google will be testing its new bubble-shaped cars on public roads near its Mountain View headquarters, it’s getting one step closer to honing its predictive technology for urban settings.
Unlike the fleet of self-driving Lexuses that are already on the road, Google’s prototype, which looks like a golf cart with doors, is designed to be a fully autonomous car in which people get in, set their destination and relax as the car does the work. The prototypes cannot go faster than 25 miles per hour and, for now, have a steering wheel and pedals so that a “safety driver” could take over.
The steering wheel is a legal requirement, but Google’s plan is to take the driver out of driving completely.
Earlier this year, during a presentation at the South by Southwest festival in Austin, Astro Teller, head of the Google X research division that created the self-driving car, said that in autumn 2012 the company started allowing Google employees to take the Lexus version home and self-drive on the freeway, so long as they kept paying attention in the event of an emergency.
Despite this, the employees got used to self-driving and stopped paying attention.
“The assumption that humans can be a reliable backup for the system was a total fallacy,” Mr. Teller said in the presentation. “Once people trust the system, they trust it.” Google realized the best thing to do “was to make a car that has no steering wheel, that has no brake pedal, that has no acceleration pedal — that drives itself all the time, from point A to point B, at the push of a button.”
Of course, nothing is accident-proof. Earlier this week, Chris Urmson, director of Google’s Self-Driving Car Project, disclosed that self-driving cars had been in 11 “minor accidents” in which there was only light damage and no injuries, and that “not once was the self-driving car the cause of the accident.”
This included seven rear-end collisions, a couple of wrecks in which cars were sideswiped and one crash in which the self-driving car was hit by a driver who rolled through a stop sign.
The challenge of city driving is one reason driverless technology has first arrived on highways. In the coming months, Tesla Motors has promised to introduce an “autopilot” feature that can take over highway driving in certain conditions. Next year, other automakers will do the same, such as General Motors’ “Super Cruise,” which will allow hands-off-the-wheel, foot-off-the-pedals highway driving.
Parking is another area that is poised for an overhaul. Companies like Ford already offer cars that pull into parking spaces automatically. The French supplier Valeo, which works with multiple automakers, is now working on technology aimed at parking garages where you can pull up to a garage and get out, leaving your car to find an available space and park itself.
When you’re ready to leave, the car acts like a robotic valet as it unparks and meets you out front.


About 33,000 people die on America’s roads every year. That’s why so much of the enthusiasm for self-driving cars has focused on their potential to reduce accident rates. As we continue to work toward our vision of fully self-driving vehicles that can take anyone from point A to point B at the push of a button, we’re thinking a lot about how to measure our progress and our impact on road safety.
One of the most important things we need to understand in order to judge our cars’ safety performance is “baseline” accident activity on typical suburban streets. Quite simply, because many incidents never make it into official statistics, we need to find out how often we can expect to get hit by other drivers. Even when our software and sensors can detect a sticky situation and take action earlier and faster than an alert human driver, sometimes we won’t be able to overcome the realities of speed and distance; sometimes we’ll get hit just waiting for a light to change. And that’s important context for communities with self-driving cars on their streets; although we wish we could avoid all accidents, some will be unavoidable.
The most common accidents our cars are likely to experience in typical day to day street driving — light damage, no injuries — aren’t well understood because they’re not reported to police. Yet according to National Highway Traffic Safety Administration (NHTSA) data, these incidents account for 55% of all crashes. It’s hard to know what’s really going on out on the streets unless you’re doing miles and miles of driving every day. And that’s exactly what we’ve been doing with our fleet of 20+ self-driving vehicles and team of safety drivers, who’ve driven 1.7 million miles (manually and autonomously combined). The cars have self-driven nearly a million of those miles, and we’re now averaging around 10,000 self-driven miles a week (a bit less than a typical American driver logs in a year), mostly on city streets.
In the spirit of helping all of us be safer drivers, we wanted to share a few patterns we’ve seen. A lot of this won’t be a surprise, especially if you already know that driver error causes 94% of crashes.
If you spend enough time on the road, accidents will happen whether you’re in a car or a self-driving car. Over the 6 years since we started the project, we’ve been involved in 11 minor accidents (light damage, no injuries) during those 1.7 million miles of autonomous and manual driving with our safety drivers behind the wheel, and not once was the self-driving car the cause of the accident.
Rear-end crashes are the most frequent accidents in America, and often there’s little the driver in front can do to avoid getting hit; we’ve been hit from behind seven times, mainly at traffic lights but also on the freeway. We’ve also been side-swiped a couple of times and hit by a car rolling through a stop sign. And as you might expect, we see more accidents per mile driven on city streets than on freeways; we were hit 8 times in many fewer miles of city driving. All the crazy experiences we’ve had on the road have been really valuable for our project. We have a detailed review process and try to learn something from each incident, even if it hasn’t been our fault.
Not only are we developing a good understanding of minor accident rates on suburban streets, we’ve also identified patterns of driver behavior (lane-drifting, red-light running) that are leading indicators of significant collisions. Those behaviors don’t ever show up in official statistics, but they create dangerous situations for everyone around them.

Lots of people aren’t paying attention to the road. In any given daylight moment in America, there are 660,000 people behind the wheel who are checking their devices instead of watching the road. Our safety drivers routinely see people weaving in and out of their lanes; we’ve spotted people reading books, and even one playing a trumpet. A self-driving car has people beat on this dimension of road safety. With 360 degree visibility and 100% attention out in all directions at all times; our newest sensors can keep track of other vehicles, cyclists, and pedestrians out to a distance of nearly two football fields.
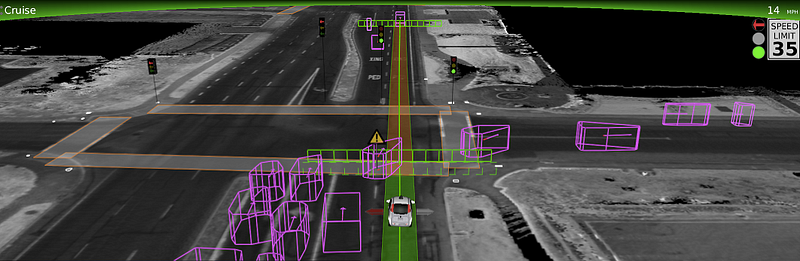
Intersections can be scary places. Over the last several years, 21% of the fatalities and about 50% of the serious injuries on U.S. roads have involved intersections. And the injuries are usually to pedestrians and other drivers, not the driver running the red light. This is why we’ve programmed our cars to pause briefly after a light turns green before proceeding into the intersection — that’s often when someone will barrel impatiently or distractedly through the intersection.

In this case, a cyclist (the light blue box) got a late start across the intersection and narrowly avoided getting hit by a car making a left turn (the purple box entering the intersection) who didn’t see him and had started to move when the light turned green. Our car predicted the cyclist’s behavior (the red path) and did not start moving until the cyclist was safely across the intersection.
Turns can be trouble. We see people turning onto, and then driving on, the wrong side of the road a lot — particularly at night, it’s common for people to overshoot or undershoot the median.

In this image you can see not one, but two cars (the two purple boxes on the left of the green path are the cars you can see in the photo) coming toward us on the wrong side of the median; this happened at night on one of Mountain View’s busiest boulevards.
Other times, drivers do very silly things when they realize they’re about to miss their turn.
A car (the purple box touching the green rectangles with an exclamation mark over it) decided to make a right turn from the lane to our left, cutting sharply across our path. The green rectangles, which we call a “fence,” indicate our car is going to slow down to avoid the car making this crazy turn.
And other times, cars seem to behave as if we’re not there. In the image below, a car in the leftmost turn lane (the purple box with a red fence through it) took the turn wide and cut off our car. In this case, the red fence indicates our car is stopping and avoiding the other vehicle.

These experiences (and countless others) have only reinforced for us the challenges we all face on our roads today. We’ll continue to drive thousands of miles so we can all better understand the all too common incidents that cause many of us to dislike day to day driving — and we’ll continue to work hard on developing a self-driving car that can shoulder this burden for us.

Chris Urmson is director of Google’s self-driving car program.
Jaywalking pedestrians. Cars lurching out of hidden driveways. Double-parked delivery trucks blocking your lane and your view. At a busy time of day, a typical city street can leave even experienced drivers sweaty-palmed and irritable. We all dream of a world in which city centers are freed of congestion from cars circling for parking (PDF) and have fewer intersections made dangerous by distracted drivers. That’s why over the last year we’ve shifted the focus of the Google self-driving car project onto mastering city street driving.

Since our last update, we’ve logged thousands of miles on the streets of our hometown of Mountain View, Calif. A mile of city driving is much more complex than a mile of freeway driving, with hundreds of different objects moving according to different rules of the road in a small area. We’ve improved our software so it can detect hundreds of distinct objects simultaneously—pedestrians, buses, a stop sign held up by a crossing guard, or a cyclist making gestures that indicate a possible turn. A self-driving vehicle can pay attention to all of these things in a way that a human physically can’t—and it never gets tired or distracted.
Here’s a video showing how our vehicle navigates some common scenarios near the Googleplex:
As it turns out, what looks chaotic and random on a city street to the human eye is actually fairly predictable to a computer. As we’ve encountered thousands of different situations, we’ve built software models of what to expect, from the likely (a car stopping at a red light) to the unlikely (blowing through it). We still have lots of problems to solve, including teaching the car to drive more streets in Mountain View before we tackle another town, but thousands of situations on city streets that would have stumped us two years ago can now be navigated autonomously.
Our vehicles have now logged nearly 700,000 autonomous miles, and with every passing mile we’re growing more optimistic that we’re heading toward an achievable goal—a vehicle that operates fully without human intervention.
The smartphone generation will be perfectly happy not dealing with the expense and hassle of car ownership — why would they when they can order up an autonomous Zipcar with a tap on their iPhone X?
Zitat aus: http://www.wired.com/geekdad/2012/10/self-driving-cars/
„Self-Driving Cars

Google Self-Driving Car (photo by Flickr user MarkDoliner, CC Licensed)
Over the past few years, there has been steady progress in the development of self-driving automobiles, and it’s pretty clear that we’re finally on the cusp of this technology going mainstream. As far as I’m concerned, driving is a waste of time, energy, and human life, so I, for one, welcome our autonomous vehicular overlords.
Signs of Change
The assertion that self-driving cars are on the verge of becoming a practical reality may seem a little bold, but the signs are clearly there. For example, California recently legalized autonomous vehicles, making them now legal in three states (Nevada and Florida are the other two). In fact, in relation to this, Bernard Lu, an attorney for the California Department of Motor Vehicles even went so far as to state that “The technology is ahead of the law in many areas” — and that was back in 2010.
And it’s not just some random GeekDad blogger that considers self-driving vehicles to be a near-term probability. GM predicts partially autonomous vehicles by 2015 and fully autonomous vehicles by 2020. Looking even further ahead, the IEEE predicts that 75% of vehices will be fully autonomous by 2040.
Simply put, the technology required to make self-driving cars a reality already exists right now. It’s currently expensive, but the cost will drop as economies of scale kick in.
The Tech Behind It
So what is the tech that makes autonomous vehicles possible? Well, the poster child for self-driving cars is definitely Google’s ongoing Driverless Car project. At last tally, the Google fleet has driven accident-free for over 300,000 miles (480,000 km), making it clear that the concept is completely viable. Each Google Driverless car is equipped with GPS, radar, video cameras, lidar (laser radar), and a lot of real-time computing power. Basic navigation relies on maps and GPS, with live sensor input to react to real-time changes. The entire setup costs about $150,000, which is obviously well beyond the reach of 99% of drivers, but, as mentioned above, this cost will scale down readily.
Another emerging technology that figures prominently in the future of autonomous vehicles is the concept of vehicular communication systems. Obviously vehicle-to-vehicle (V2V) communication and vehicle-to-infrastructure (V2I) communication will make it possible to dynamically route traffic in such a way as to maximize flow and minimize travel times. Say good-bye to traffic jams and road rage, kids.
Why it Will Be Great
In addition to no more traffic jams, self-driving cars promise many other benefits:
All of the above and more will make the society of the future a very different place than what we’re used to now. That kind of change is likely going to take some adjustment for us older folks, but what about the upcoming generations that will grow up with this? Well, we’re already seeing some signs of a change in attitude there.
The Millennials
Interestingly, the Millennials (people born between 1980 and 2000, approximately) have very different attitudes toward driving than us older folks. In particular, the Millennials are far less interested in drivingthan their parents and grand-parents. There are, of course, plenty of reasons for this attitude, including rising gas costs, an anemic economy, depressed wages, and increasing re-urbanization – none of which is likely to change much in the near future. All of these factors lead to a demographic that is open to the reinvention of vehicular transportation. As Sheryl Connelly, head of global consumer trends at Ford, said, “Young people value access over ownership.”
The smartphone generation will be perfectly happy not dealing with the expense and hassle of car ownership — why would they when they can order up an autonomous Zipcar with a tap on their iPhone X?
Obstacles
Of course, there are going to be some bumps in the road on the way to our self-driving future. First up is the usual human resistance to change, though 50% of people surveyed today said they would be comfortable riding in a driverless car. That degree of acceptance suggests a rapid uptake once the technology becomes reasonable in price.
Another guaranteed problem is concern about safety. As mentioned before, autonomous vehicles will be far more reliable than human drivers; however, there will inevitably be an accident involving a self-driving car, and the event will be sensationalized by the media. In the end though, the desire to decrease the number of traffic-related fatalities in the world will drive adoption (just for reference, over 30,000 people die each year in vehicle-related deaths in the US alone).
From the GeekDad perspective, the most worrisome thing about autonomous vehicles that I can think of is the possibility of vulnerabilities in the software. We have serious issues with exploits in current operating systems and applications — how much riskier will it be when the compromised computer is rolling along at 60mph? Clearly these systems are going to require a level of security that will embarrass today’s military-grade gear.
Future Consequences
So what are the implications of large-scale adoption of self-driving vehicles? An obvious thought is the corresponding redesign of the road system. Just as we now have commuter lanes, there will undoubtedly be dedicated lanes for driverless vehicles. In fact, eventually the majority of lanes will be reserved for autonomous vehicles, with a few “slow” lanes left over for manually-operated cars and horse-drawn buggies. And if we look even further ahead, eventually it will be illegal to drive a car on public roads.
Another anticipated change relates to the fact that driverless cars need not even be “cars.” Vehicles of the future won’t necessarily just transport humans, so there will likely be a wide spectrum of designs, from large cargo transports to small pizza delivery mini-mobiles. Of course, the technology behind self-driving cars will transfer easily to trains, streetcars, subways, ships, and possibly even aircraft (though that last one makes me a little nervous).
As with any other labor-saving advance in technology, an inevitable consequence of autonomous vehicles will be the elimination of a lot of jobs. Yes, there will be new jobs created to build and service these vehicles, but I’m pretty sure that far more jobs will be eliminated than created. In theory, this should mean that the overall efficiency of the system is increased, and humans will have increased time available to do more valuable work; in practice though, the transition involves a lot of disruption.
Conclusion…
The signs are clear: autonomous vehicles are coming. The technology is already real, and it’s just a matter of scaling down the cost. Once that happens, there will be rapid adoption of driverless automobiles that will result in a complete redefinition of travel. Yes, there are some negatives to this impending transition, but overall, the shift to self-driving vehicles will be a net-positive for society.
And If you’re interested in autonomous vehicles, be sure to check out Brad Templeton’s Robocar page.
“
Clifford Nass talks about why the automobile is so central to modern life. He discusses the future of autonomous vehicles and describes the human element of auto-mobility.
There is the Google Car Approach and there is the Car Manufacturers Approach.
Originally presented in the Stanford Continuing Studies Program.
Audi präsentierte auf der CES International 2013 die weltweit erste Lizenz für den Betrieb von Computergesteuerten Fahrzeugen.
Die Kooperation zwischen der US-Universität Stanford und Audi mündete bereits vor einigen Monaten in einem Rennwagen, der selbstständig eine vorgegebene Route befährt und darin sicherer als ein menschlicher Rennfahrer rascher auf Bodengegebenheiten und Verkehrssituationen reagieren kann.
Nevada grants Audi the first automaker permit to operate autonomous vehicles on public roads
• Audi gets second-ever license from the state to test Audi piloted driving
• Audi piloted driving and parking technology will be a focus at 2013 CES
• Audi has been an autonomous driving pioneer through work by its Electronics Research Lab in Silicon Valley and Stanford University
