Somewhere between texting and video chat, the mobile phone stopped being a phone. But there’s a special intimacy unique to simply talking to someone, and early YouTuber Brent Hurley wants to bring it back with SayMore. His new app lets you browse pre-made discussion topics, preview the profile of a conversation partner, and start a free VOIP call with them. You know, so you can just talk about your feelings.
Backed by Brent’s brother, YouTube co-founder Chad Hurley, plus its early CFO Gideon Yu and biz dev wizard Chris Maxcy, SayMore is now available on iOS.
While it might be novel to chat up a stranger, attempts in the meatspace like Highlight and over video like ChatRoulette and Airtime have petered out. SayMore will need a way to keep people coming back to blather or home in on some truly lonely users who need the company of strangers. Otherwise, it might see its line go dead.
Once you fill out a brief profile blurb, SayMore gives you a curated list of things to talk about. Some examples include:
Eurozone: What’s next for Greece and the EU?
Fashion: Share tips on how to spruce up your summer wardrobe!
Technology: Is Uber good for the world?
Parenting: What can I do to give my kids a leg up in this world?
Trending: Is social media bringing us closer together or driving us apart?
Pick one you like, vet the person you’ll connect with, and you start the call with one tap. For privacy, you never enter your phone number or see anyone else’s, or their last name. The calls run with HD voice over cellular or Wi-Fi for free, and sound better than a normal phone call.
If you’re the only one interested in a topic right now, SayMore lets you select it and a couple other topics you’re into, and choose how long to be available for someone to call you. Then you can go about your day and wait for a ping.
Conveniently, when I first tried using SayMore, I got connected to Brent. I’d picked through some of the tech topic prompts and chose one about “Startup Founders: What’s keeping you up at night?”
Brent came up with SayMore after an inspired conversation with the guy next to him on a plane. We gabbed about whether people really needed another way to communicate. Brent explained that it can be tough to cut through the manicured success theater people purport on a place like Facebook, but the power of voice can trigger real emotions.
“We do think that humans are social creatures by nature,” Brent says. SayMore is there “Anytime they want to have a deeper connection rather than posting a status update where people might just Like it or retweet it, but there isn’t a dialogue that takes place.” He concludes, “the current social networks are more broadcast platforms.”
Eventually, SayMore wants to let you friend the people you chat with “to create a conversation graph — a new friend list centered around conversations.” Then when you have something you want to talk about, you could send the topic out to all your SayMore friends, and whoever’s free could jump on the line with you. That could be the answer to how SayMore avoids people getting bored of strangers and never coming back.
Still, with all the vivid communication mediums and other digital distractions, it’s hard to imagine SayMore occupying people’s time. It’s nice to imagine people looking up from their phones and taking a stroll through their neighborhood, observing life outside the screen while they chat about something they care about. But the reason people love texting is that phone calls take energy to keep alive. Most people would rather just bury their face in something mindless like Candy Crush, or browse their News Feed where there’s no pressure to create, just consume.
Loneliness and alienation are real problems worth solving. But SayMore will have to fight the current as everyone says less.
Click to Open Overlay Gallery GETTY IMAGESTHE BLOOD TEST is a cornerstone of modern medicine. In many cases, it provides evidence that turns a bundle of symptoms to a treatable diagnosis. It’s also inconvenient at best, painful at worst, and expensive.
The Silicon Valley company Theranos has an alternative—instead of a hypodermic needle and multiple vials of blood, Theranos technology uses a finger prick like the one diabetics use to measure their blood sugar. With just a few milliliters of blood Theranos can test for hundreds of things, from cancer biomarkers to cholesterol counts, illegal drugs to infectious diseases. What’s more, many of the tests are cheap. And in at least one state, the system doesn’t require a visit to a doctor’s office or a lab. But Theranos has been slow to deploy its system.
Now things are starting to pick up. On Thursday the US Department of Health and Human Services gave the company a Clinical Laboratory Improvement Amendments waiver1 for a single finger-prick blood test, for type 1 herpes simplex. But that CLIA waiver does much more than approve one test—it also covers Theranos’ complete system, hardware and software underpinning the entire diagnostic suite. That means that Theranos’ partners, places like Capital BlueCross, Amerihealth Caritas, and the Cleveland Clinic, can install Theranos tech in place instead of having to send samples back to the company’s Silicon Valley headquarters for testing.
And earlier in July, the FDA declared that same finger-prick herpes test was just as effective as the current version, the one with needles. Then Arizona made it legal to get a blood test without a doctor’s permission, on your own initiative.
Taken together, these developments mean Theranos is on its way to reinventing the field of clinical chemistry—that’s blood work. And that has some scientists worried. While Theranos has touted the fact that the FDA says its tests work as well as traditional diagnostics, the company hasn’t been forthcoming about how the tests work. So physicians are asking if it’s enough for Theranos to be cheaper and faster when they don’t know—can’t know—how the company gets its results.
Better, Faster Tests
Today two companies dominate the diagnostic blood test business: Quest Diagnostics and LabCorp. As far as price is concerned, Theranos is already winning. Quest and LabCorp tests can cost…well, that depends—on your hospital, your insurer, on the day of the week. Diagnostic tests—despite being pretty much the same everywhere—don’t have any official pricing. Many Theranos tests, on the other hand, cost less than $10, and the company posts its prices openly. Quest did not respond to requests for comment for this story, and LabCorp declined to comment altogether.
Theranos also wants to be fast. Like, wecantellyouifyouhaveherpesinamatterofhours fast. Back when anyone using a Theranos kit had to ship samples back to California for analysis, results were slow. Now that Theranos can distribute testing technology to all its partners, that’s fixed. Patients at any of Theranos’ partner institutions can walk in, get a finger-prick, and get their results.
In fact, pretty soon those patients might not even need a doctor’s note to get that test. Theranos’ CEO Elizabeth Holmes has repeatedly stated her desire to put blood tests into patients hands. The company declined to make her available for this story, but in 2014, she told WIRED:
There are a billion tests done every year in the United States, but too many of them are done in the emergency room. If you were able to do some of those tests before a person gets checked into the ER, you’d start to see problems earlier; you’d have time to intervene before a patient needed to go to the hospital. If you remove the biggest barriers to these tests, you’ll see them used in smarter ways.
That kind of access has already begun. In Arizona, a new law (co-authored by Theranos) cuts out the middle medic. People there can walk into a Walgreens—another Theranos partner—and get any of the tests the company offers, without a physician even knowing about it.
This doesn’t drive the medical community as insane as you’d think. “I’m in favor of open access for the patients themselves. Once available, the patient should not wonder about the results, if not have access to them,” says David Koch, a clinical pathologist at Emory University and president of the American Association of Clinical Chemistry. “The concern is that you need help in interpreting those results and knowing what to do next.”
Yes-or-no tests are great for finding out if you have herpes or your kid is on meth, but that can get a little trickier when you’re talking about more complex conditions. For example, if a man with prostate cancer has his prostate removed, his levels of Prostate-Specific Antigen should drop below detectability. If they come back, says Stephen Master, director of clinical chemistry at Cornell Weill Medical College, it signal that he has leftover prostate cells, and those may or may not be cancerous. “But all that depends on if you have a suitable baseline,” Master says. Establishing that baseline can be difficult, even for experienced physicians using established tests. All of which means that test results often require expertise to figure out their meaning.
I asked Theranos if the company had a plan to provide counseling or otherwise educate people who used their tests. A spokesperson responded by pointing me to this quote from this press release: “The Theranos model is physician-centric. Our goal in providing more accessible, less expensive, and less painful diagnostic tests is to enable individuals and physicians to better engage early when interventions can be most effective.”
Silicon Valley’s Best Hope for Beating Amazon Is Live
JetJet.com is one of the most buzzed-about companies in Silicon Valley, raising $255 million even before launching to the public. And yet its mission seems doomed from the start: to compete with Amazon in online retail.
But you have to give Jet credit for a strategy that, however sophisticated the machinery underlying it, sticks to the basics. Jet thinks it can win by saving you money.
The long-awaited startup is coming out of beta and launching its online marketplace today with the promise to get you the best price for any product you want to buy. Jet wants to be the place you think of first when you need to restock everyday stuff—toothpaste, toilet paper, a new speaker, or pretty much anything (besides fresh produce—for now).
Jet
The catch? Similar to Costco or Sam’s Club, you pay a $50 membership fee to Jet each year to have access to its goods. With your card, the company promises low prices and savings, claiming members will save an average of $150 a year.
As a shopper, you already have plenty of options from major megastores—Amazon, Walmart, Costco, Target—to smaller niche retailers online and IRL. You likely already have a favorite place to get discounted electronics or deals on household products.
But Jet thinks it can elbow its way into retail by changing how it works. “We’re trying to do something different in that, pretty much anything you want to buy from TVs to toilet paper, you could get 10-15 percent off what you normally spend, without doing anything other than coming to our site and becoming a member,” Liza Landsman, Jet’s executive vice president and chief customer officer, says.
Now that it’s live, we’ll finally get a chance to see if Jet is the next big thing—or the next big bust.
How It Works
Unlike other online retailers, Jet’s revenue comes only from membership fees, not sales. This gives the company every incentive to charge the lowest price possible for items to get you to sign up.
Jet
Behind the scenes, Jet uses a pricing engine to help you find the lowest price. Let’s say you decide you want to shop for that toothpaste, toilet paper, and shower speaker. On top of its already lower sticker price, the site offers additional savings if you, say, buy the toothpaste and toilet paper from the same retailer, or from the same location. (Jet sells some merchandise itself but mostly acts as a marketplace for third-party sellers.) The company says you can gain additional savings by, for instance, waiving the option for free returns or, eventually, opting for slower delivery.
Earlier this year, Jet founder and CEO Marc Lore told my WIRED colleague Issie Lapowsky that Jet’s tech resembles a real-time financial trading service. With the help of this service, Jet not only allows you to find the cheapest available price for a product but also recalculates your shopping cart as you add more products, applying rules based on what the retailers themselves are offering and showing you in real-time how to get more savings by, say, buying two products together. More stuff may mean more discounts.
For retailers, this set-up might seem like a nightmarish recipe for losing money. But Jet says that it doesn’t undercut retailers since it isn’t itself taking a cut, unlike some other online retailers. In fact, for products that aren’t already in its inventory or from one of its partners, the Wall Street Journal reports that Jet is actually buying products at their regular prices from those outside retailers (and paying for shipping charges) while still offering the discounted price to its customers. At times, Jet is taking the loss, it seems, in the hope that it can keep you coming back.
Jet
Future of Retail
But if Jet is forced to pay the difference to deliver goods to you on the cheap, the company may have a difficult time becoming profitable (this challenge has stymied Amazon for the past two decades). In fact, for Jet to succeed—and to fend off retailers such as Amazon, Walmart, and Costco—it will likely need to prepare for several years of losses, if not more. Jet’s model can only succeed at a huge, huge scale—and to get there, it’ll need lots and lots of people like you.
Of course, that may very well happen. According to Forrester Research, 69 percent of the US online population “regularly buys products online.” This year Americans are expected to spend $300 billion online, a number that will likely only keep on growing. “You’ll see more people adopting e-commerce and buying more,” says eMarketer retail analyst Yoram Wurmser. “There’s a lot of room for growth.”
By appealing to the more frugal side of all of us, Jet and its backers expect this audacious startup can not only save us money, but truly challenge Amazon in the process. “Jet is legitimate. It’s small, it’s a startup, but it’s got a good model,” Wurmser adds. “I think Jet does represent a competitor because they can undercut prices.” And, after all, who doesn’t want cheaper stuff? It just has to solve one of the most tantalizing paradoxes of retail: making more money by letting you pay less.
Apple Doesn’t Want You to Know How Many Watches It Sold
A display case containing the Apple Watch Sport at the company’s flagship store in San Francisco, on June 17, 2015. Robert Galbraith/Reuters/CorbisWhat about the Watch?Apple released its fiscal third-quarter results today—its first earnings report since the Apple Watch launched in April in nine countries. But it didn’t break out Watch sales separately, as it does with iPhones and iPads. Instead, Apple folded Watch revenue into its “other products” category, which also includes the iPod, Apple TV, Beats headphones, and other accessories. This reticence isn’t exactly surprising; Apple CEO Tim Cook has said in the past that he intends to keep quiet on actual sales numbers for competitive reasons. But it’s still hard not to think that if the Apple Watch really was a blockbuster, Apple would say so.
“We had an amazing quarter, with iPhone revenue up 59 percent over last year, strong sales of Mac, all-time record revenue from services, driven by the App Store, and a great start for Apple Watch,” Apple CEO Tim Cook said in a statement. But how great a start Apple wasn’t saying.
What’s New
Here’s what we do know for sure: Apple reported $2.6 billion in revenue for its “other products” during the third fiscal quarter, up from $1.7 billion one quarter ago. Apple doesn’t break out the number of units shipped in this category, so there’s not a simple way to determine exactly how many watches Apple has sold by comparing to past results. Yes, the nearly $1 billion bump in “other products” does stop a downward slide. It seems reasonable to infer that the Watch seems to have added to Apple’s bottom line. But by how much, and thanks to how many watches, are both difficult to say.
The performance of the Apple Watch is of particular interest not just because of the marketing hype, but because it’s Apple’s first foray into a major new product category under CEO Tim Cook. The wild success of newer iPhone models has taken pressure off Cook to show Apple still has its mojo in the post-Steve Jobs era. But staking a first-mover claim to a new category the way Apple under Jobs did with the iPhone and iPad is still a bullet point missing from Cook’s résumé.
That’s Saying Something
And in the past, after Apple has released major new products, it has said, well, something. When the iPhone launched in the third quarter of 2007, Apple revealed specific numbers: 270,000 iPhones sold in the first two days after it was released at the end of the quarter. The “iPhone is off to a great start—we hope to sell our one-millionth iPhone by the end of its first full quarter of sales,” Jobs said in a statement at the time—a mark it did hit after 74 days.
In the third quarter of 2010, after the iPad first went on sale, Jobs specifically broke out the number of tablets the company moved. “It was a phenomenal quarter that exceeded our expectations all around,” Jobs said. “iPad is off to a terrific start.” The company announced it had sold nearly 3.3 million iPads that quarter—300,000 units globally the first day and 1 million sales in 28 days.
All of which makes Apple’s silence around the Apple Watch fairly deafening. (We’re waiting to see what Tim Cook might say about the Watch during his call with analysts in a few minutes.) Anything short of hard numbers leaves us with just anecdotal evidence. If Apple isn’t willing to save us from the anecdotal, maybe that’s the most revealing anecdote of all.
I was driving 70 mph on the edge of downtown St. Louis when the exploit began to take hold.Though I hadn’t touched the dashboard, the vents in the Jeep Cherokee started blasting cold air at the maximum setting, chilling the sweat on my back through the in-seat climate control system. Next the radio switched to the local hip hop station and began blaring Skee-lo at full volume. I spun the control knob left and hit the power button, to no avail. Then the windshield wipers turned on, and wiper fluid blurred the glass.
As I tried to cope with all this, a picture of the two hackers performing these stunts appeared on the car’s digital display: Charlie Miller and Chris Valasek, wearing their trademark track suits. A nice touch, I thought.
The Jeep’s strange behavior wasn’t entirely unexpected. I’d come to St. Louis to be Miller and Valasek’s digital crash-test dummy, a willing subject on whom they could test the car-hacking research they’d been doing over the past year. The result of their work was a hacking technique—what the security industry calls a zero-day exploit—that can target Jeep Cherokees and give the attacker wireless control, via the Internet, to any of thousands of vehicles. Their code is an automaker’s nightmare: software that lets hackers send commands through the Jeep’s entertainment system to its dashboard functions, steering, brakes, and transmission, all from a laptop that may be across the country.
To better simulate the experience of driving a vehicle while it’s being hijacked by an invisible, virtual force, Miller and Valasek refused to tell me ahead of time what kinds of attacks they planned to launch from Miller’s laptop in his house 10 miles west. Instead, they merely assured me that they wouldn’t do anything life-threatening. Then they told me to drive the Jeep onto the highway. “Remember, Andy,” Miller had said through my iPhone’s speaker just before I pulled onto the Interstate 64 on-ramp, “no matter what happens, don’t panic.”1
Click to Open Overlay GalleryCharlie Miller (left) and Chris Valasek hacking into a Jeep Cherokee from Miller’s basement as I drove the SUV on a highway ten miles away. Whitney Curtis for WIRED
As the two hackers remotely toyed with the air-conditioning, radio, and windshield wipers, I mentally congratulated myself on my courage under pressure. That’s when they cut the transmission.
Immediately my accelerator stopped working. As I frantically pressed the pedal and watched the RPMs climb, the Jeep lost half its speed, then slowed to a crawl. This occurred just as I reached a long overpass, with no shoulder to offer an escape. The experiment had ceased to be fun.
At that point, the interstate began to slope upward, so the Jeep lost more momentum and barely crept forward. Cars lined up behind my bumper before passing me, honking. I could see an 18-wheeler approaching in my rearview mirror. I hoped its driver saw me, too, and could tell I was paralyzed on the highway.
“You’re doomed!” Valasek shouted, but I couldn’t make out his heckling over the blast of the radio, now pumping Kanye West. The semi loomed in the mirror, bearing down on my immobilized Jeep.
I followed Miller’s advice: I didn’t panic. I did, however, drop any semblance of bravery, grab my iPhone with a clammy fist, and beg the hackers to make it stop.
Wireless Carjackers
This wasn’t the first time Miller and Valasek had put me behind the wheel of a compromised car. In the summer of 2013, I drove a Ford Escape and a Toyota Prius around a South Bend, Indiana, parking lot while they sat in the backseat with their laptops, cackling as they disabled my brakes, honked the horn, jerked the seat belt, and commandeered the steering wheel. “When you lose faith that a car will do what you tell it to do,” Miller observed at the time, “it really changes your whole view of how the thing works.” Back then, however, their hacks had a comforting limitation: The attacker’s PC had been wired into the vehicles’ onboard diagnostic port, a feature that normally gives repair technicians access to information about the car’s electronically controlled systems.
A mere two years later, that carjacking has gone wireless. Miller and Valasek plan to publish a portion of their exploit on the Internet, timed to a talk they’re giving at the Black Hat security conference in Las Vegas next month. It’s the latest in a series of revelations from the two hackers that have spooked the automotive industry and even helped to inspire legislation; WIRED has learned that senators Ed Markey and Richard Blumenthal plan to introduce an automotive security bill today to set new digital security standards for cars and trucks, first sparked when Markey took note of Miller and Valasek’s work in 2013.
As an auto-hacking antidote, the bill couldn’t be timelier. The attack tools Miller and Valasek developed can remotely trigger more than the dashboard and transmission tricks they used against me on the highway. They demonstrated as much on the same day as my traumatic experience on I-64; After narrowly averting death by semi-trailer, I managed to roll the lame Jeep down an exit ramp, re-engaged the transmission by turning the ignition off and on, and found an empty lot where I could safely continue the experiment.
Miller and Valasek’s full arsenal includes functions that at lower speeds fully kill the engine, abruptly engage the brakes, or disable them altogether. The most disturbing maneuver came when they cut the Jeep’s brakes, leaving me frantically pumping the pedal as the 2-ton SUV slid uncontrollably into a ditch. The researchers say they’re working on perfecting their steering control—for now they can only hijack the wheel when the Jeep is in reverse. Their hack enables surveillance too: They can track a targeted Jeep’s GPS coordinates, measure its speed, and even drop pins on a map to trace its route.
Click to Open Overlay GalleryMiller attempts to rescue the Jeep after its brakes were remotely disabled, sending it into a ditch. Andy Greenberg/WIRED
All of this is possible only because Chrysler, like practically all carmakers, is doing its best to turn the modern automobile into a smartphone. Uconnect, an Internet-connected computer feature in hundreds of thousands of Fiat Chrysler cars, SUVs, and trucks, controls the vehicle’s entertainment and navigation, enables phone calls, and even offers a Wi-Fi hot spot. And thanks to one vulnerable element, which Miller and Valasek won’t identify until their Black Hat talk, Uconnect’s cellular connection also lets anyone who knows the car’s IP address gain access from anywhere in the country. “From an attacker’s perspective, it’s a super nice vulnerability,” Miller says.
From that entry point, Miller and Valasek’s attack pivots to an adjacent chip in the car’s head unit—the hardware for its entertainment system—silently rewriting the chip’s firmware to plant their code. That rewritten firmware is capable of sending commands through the car’s internal computer network, known as a CAN bus, to its physical components like the engine and wheels. Miller and Valasek say the attack on the entertainment system seems to work on any Chrysler vehicle with Uconnect from late 2013, all of 2014, and early 2015. They’ve only tested their full set of physical hacks, including ones targeting transmission and braking systems, on a Jeep Cherokee, though they believe that most of their attacks could be tweaked to work on any Chrysler vehicle with the vulnerable Uconnect head unit. They have yet to try remotely hacking into other makes and models of cars.
After the researchers reveal the details of their work in Vegas, only two things will prevent their tool from enabling a wave of attacks on Jeeps around the world. First, they plan to leave out the part of the attack that rewrites the chip’s firmware; hackers following in their footsteps will have to reverse-engineer that element, a process that took Miller and Valasek months. But the code they publish will enable many of the dashboard hijinks they demonstrated on me as well as GPS tracking.
Second, Miller and Valasek have been sharing their research with Chrysler for nearly nine months, enabling the company to quietly release a patch ahead of the Black Hat conference. On July 16, owners of vehicles with the Uconnect feature were notified of the patch in a post on Chrysler’s website that didn’t offer any details or acknowledge Miller and Valasek’s research. “[Fiat Chrysler Automobiles] has a program in place to continuously test vehicles systems to identify vulnerabilities and develop solutions,” reads a statement a Chrysler spokesperson sent to WIRED. “FCA is committed to providing customers with the latest software updates to secure vehicles against any potential vulnerability.”
If consumers don’t realize this is an issue, they should, and they should start complaining to carmakers. This might be the kind of software bug most likely to kill someone. Charlie Miller
Unfortunately, Chrysler’s patch must be manually implemented via a USB stick or by a dealership mechanic. (Download the update here.) That means many—if not most—of the vulnerable Jeeps will likely stay vulnerable.
Chrysler stated in a response to questions from WIRED that it “appreciates” Miller and Valasek’s work. But the company also seemed leery of their decision to publish part of their exploit. “Under no circumstances does FCA condone or believe it’s appropriate to disclose ‘how-to information’ that would potentially encourage, or help enable hackers to gain unauthorized and unlawful access to vehicle systems,” the company’s statement reads. “We appreciate the contributions of cybersecurity advocates to augment the industry’s understanding of potential vulnerabilities. However, we caution advocates that in the pursuit of improved public safety they not, in fact, compromise public safety.”
The two researchers say that even if their code makes it easier for malicious hackers to attack unpatched Jeeps, the release is nonetheless warranted because it allows their work to be proven through peer review. It also sends a message: Automakers need to be held accountable for their vehicles’ digital security. “If consumers don’t realize this is an issue, they should, and they should start complaining to carmakers,” Miller says. “This might be the kind of software bug most likely to kill someone.”
In fact, Miller and Valasek aren’t the first to hack a car over the Internet. In 2011 a team of researchers from the University of Washington and the University of California at San Diego showed that they could wirelessly disable the locks and brakes on a sedan. But those academics took a more discreet approach, keeping the identity of the hacked car secret and sharing the details of the exploit only with carmakers.
Miller and Valasek represent the second act in a good-cop/bad-cop routine. Carmakers who failed to heed polite warnings in 2011 now face the possibility of a public dump of their vehicles’ security flaws. The result could be product recalls or even civil suits, says UCSD computer science professor Stefan Savage, who worked on the 2011 study. Earlier this month, in fact, Range Rover issued a recall to fix a software security flaw that could be used to unlock vehicles’ doors. “Imagine going up against a class-action lawyer after Anonymous decides it would be fun to brick all the Jeep Cherokees in California,” Savage says.
For the auto industry and its watchdogs, in other words, Miller and Valasek’s release may be the last warning before they see a full-blown zero-day attack. “The regulators and the industry can no longer count on the idea that exploit code won’t be in the wild,” Savage says. “They’ve been thinking it wasn’t an imminent danger you needed to deal with. That implicit assumption is now dead.”
471,000 Hackable Automobiles
Click to Open Overlay GalleryMiller and Valasek’s exploit uses a burner phone’s cellular connection to attack the Jeep’s internet-connected entertainment system. Whitney Curtis for WIRED
Sitting on a leather couch in Miller’s living room as a summer storm thunders outside, the two researchers scan the Internet for victims.
Uconnect computers are linked to the Internet by Sprint’s cellular network, and only other Sprint devices can talk to them. So Miller has a cheap Kyocera Android phone connected to his battered MacBook. He’s using the burner phone as a Wi-Fi hot spot, scouring for targets using its thin 3G bandwidth.
A set of GPS coordinates, along with a vehicle identification number, make, model, and IP address, appears on the laptop screen. It’s a Dodge Ram. Miller plugs its GPS coordinates into Google Maps to reveal that it’s cruising down a highway in Texarkana, Texas. He keeps scanning, and the next vehicle to appear on his screen is a Jeep Cherokee driving around a highway cloverleaf between San Diego and Anaheim, California. Then he locates a Dodge Durango, moving along a rural road somewhere in the Upper Peninsula of Michigan. When I ask him to keep scanning, he hesitates. Seeing the actual, mapped locations of these unwitting strangers’ vehicles—and knowing that each one is vulnerable to their remote attack—unsettles him.
When Miller and Valasek first found the Uconnect flaw, they thought it might only enable attacks over a direct Wi-Fi link, confining its range to a few dozen yards. When they discovered the Uconnect’s cellular vulnerability earlier this summer, they still thought it might work only on vehicles on the same cell tower as their scanning phone, restricting the range of the attack to a few dozen miles. But they quickly found even that wasn’t the limit. “When I saw we could do it anywhere, over the Internet, I freaked out,” Valasek says. “I was frightened. It was like, holy fuck, that’s a vehicle on a highway in the middle of the country. Car hacking got real, right then.”
That moment was the culmination of almost three years of work. In the fall of 2012, Miller, a security researcher for Twitter and a former NSA hacker, and Valasek, the director of vehicle security research at the consultancy IOActive, were inspired by the UCSD and University of Washington study to apply for a car-hacking research grant from Darpa. With the resulting $80,000, they bought a Toyota Prius and a Ford Escape. They spent the next year tearing the vehicles apart digitally and physically, mapping out their electronic control units, or ECUs—the computers that run practically every component of a modern car—and learning to speak the CAN network protocol that controls them.
When they demonstrated a wired-in attack on those vehicles at the DefCon hacker conference in 2013, though, Toyota, Ford, and others in the automotive industry downplayed the significance of their work, pointing out that the hack had required physical access to the vehicles. Toyota, in particular, argued that its systems were “robust and secure” against wireless attacks. “We didn’t have the impact with the manufacturers that we wanted,” Miller says. To get their attention, they’d need to find a way to hack a vehicle remotely.
So the next year, they signed up for mechanic’s accounts on the websites of every major automaker and downloaded dozens of vehicles’ technical manuals and wiring diagrams. Using those specs, they rated 24 cars, SUVs, and trucks on three factors they thought might determine their vulnerability to hackers: How many and what types of radios connected the vehicle’s systems to the Internet; whether the Internet-connected computers were properly isolated from critical driving systems, and whether those critical systems had “cyberphysical” components—whether digital commands could trigger physical actions like turning the wheel or activating brakes.
Based on that study, they rated Jeep Cherokee the most hackable model. Cadillac’s Escalade and Infiniti’s Q50 didn’t fare much better; Miller and Valasek ranked them second- and third-most vulnerable. When WIRED told Infiniti that at least one of Miller and Valasek’s warnings had been borne out, the company responded in a statement that its engineers “look forward to the findings of this [new] study” and will “continue to integrate security features into our vehicles to protect against cyberattacks.” Cadillac emphasized in a written statement that the company has released a new Escalade since Miller and Valasek’s last study, but that cybersecurity is “an emerging area in which we are devoting more resources and tools,” including the recent hire of a chief product cybersecurity officer.
After Miller and Valasek decided to focus on the Jeep Cherokee in 2014, it took them another year of hunting for hackable bugs and reverse-engineering to prove their educated guess. It wasn’t until June that Valasek issued a command from his laptop in Pittsburgh and turned on the windshield wipers of the Jeep in Miller’s St. Louis driveway.
Since then, Miller has scanned Sprint’s network multiple times for vulnerable vehicles and recorded their vehicle identification numbers. Plugging that data into an algorithm sometimes used for tagging and tracking wild animals to estimate their population size, he estimated that there are as many as 471,000 vehicles with vulnerable Uconnect systems on the road.
Pinpointing a vehicle belonging to a specific person isn’t easy. Miller and Valasek’s scans reveal random VINs, IP addresses, and GPS coordinates. Finding a particular victim’s vehicle out of thousands is unlikely through the slow and random probing of one Sprint-enabled phone. But enough phones scanning together, Miller says, could allow an individual to be found and targeted. Worse, he suggests, a skilled hacker could take over a group of Uconnect head units and use them to perform more scans—as with any collection of hijacked computers—worming from one dashboard to the next over Sprint’s network. The result would be a wirelessly controlled automotive botnet encompassing hundreds of thousands of vehicles.
“For all the critics in 2013 who said our work didn’t count because we were plugged into the dashboard,” Valasek says, “well, now what?”
Now the auto industry needs to do the unglamorous, ongoing work of actually protecting cars from hackers. And Washington may be about to force the issue.
Later today, senators Markey and Blumenthal intend to reveal new legislation designed to tighten cars’ protections against hackers. The bill (which a Markey spokesperson insists wasn’t timed to this story) will call on the National Highway Traffic Safety Administration and the Federal Trade Commission to set new security standards and create a privacy and security rating system for consumers. “Controlled demonstrations show how frightening it would be to have a hacker take over controls of a car,” Markey wrote in a statement to WIRED. “Drivers shouldn’t have to choose between being connected and being protected…We need clear rules of the road that protect cars from hackers and American families from data trackers.”
Markey has keenly followed Miller and Valasek’s research for years. Citing their 2013 Darpa-funded research and hacking demo, he sent a letter to 20 automakers, asking them to answer a series of questions about their security practices. The answers, released in February, show what Markey describes as “a clear lack of appropriate security measures to protect drivers against hackers who may be able to take control of a vehicle.” Of the 16 automakers who responded, all confirmed that virtually every vehicle they sell has some sort of wireless connection, including Bluetooth, Wi-Fi, cellular service, and radios. (Markey didn’t reveal the automakers’ individual responses.) Only seven of the companies said they hired independent security firms to test their vehicles’ digital security. Only two said their vehicles had monitoring systems that checked their CAN networks for malicious digital commands.
UCSD’s Savage says the lesson of Miller and Valasek’s research isn’t that Jeeps or any other vehicle are particularly vulnerable, but that practically any modern vehicle could be vulnerable. “I don’t think there are qualitative differences in security between vehicles today,” he says. “The Europeans are a little bit ahead. The Japanese are a little bit behind. But broadly writ, this is something everyone’s still getting their hands around.”
Click to Open Overlay GalleryMiller (left) and Valasek demonstrated the rest of their attacks on the Jeep while I drove it around an empty parking lot. Whitney Curtis for WIRED
Aside from wireless hacks used by thieves to open car doors, only one malicious car-hacking attack has been documented: In 2010 a disgruntled employee in Austin, Texas, used a remote shutdown system meant for enforcing timely car payments to brick more than 100 vehicles. But the opportunities for real-world car hacking have only grown, as automakers add wireless connections to vehicles’ internal networks. Uconnect is just one of a dozen telematics systems, including GM Onstar, Lexus Enform, Toyota Safety Connect, Hyundai Bluelink, and Infiniti Connection.
In fact, automakers are thinking about their digital security more than ever before, says Josh Corman, the cofounder of I Am the Cavalry, a security industry organization devoted to protecting future Internet-of-things targets like automobiles and medical devices. Thanks to Markey’s letter, and another set of questions sent to automakers by the House Energy and Commerce Committee in May, Corman says, Detroit has known for months that car security regulations are coming.
But Corman cautions that the same automakers have been more focused on competing with each other to install new Internet-connected cellular services for entertainment, navigation, and safety. (Payments for those services also provide a nice monthly revenue stream.) The result is that the companies have an incentive to add Internet-enabled features—but not to secure them from digital attacks. “They’re getting worse faster than they’re getting better,” he says. “If it takes a year to introduce a new hackable feature, then it takes them four to five years to protect it.”
Corman’s group has been visiting auto industry events to push five recommendations: safer design to reduce attack points, third-party testing, internal monitoring systems, segmented architecture to limit the damage from any successful penetration, and the same Internet-enabled security software updates that PCs now receive. The last of those in particular is already catching on; Ford announced a switch to over-the-air updates in March, and BMW used wireless updates to patch a hackable security flaw in door locks in January.
Corman says carmakers need to befriend hackers who expose flaws, rather than fear or antagonize them—just as companies like Microsoft have evolved from threatening hackers with lawsuits to inviting them to security conferences and paying them “bug bounties” for disclosing security vulnerabilities. For tech companies, Corman says, “that enlightenment took 15 to 20 years.” The auto industry can’t afford to take that long. “Given that my car can hurt me and my family,” he says, “I want to see that enlightenment happen in three to five years, especially since the consequences for failure are flesh and blood.”
As I drove the Jeep back toward Miller’s house from downtown St. Louis, however, the notion of car hacking hardly seemed like a threat that will wait three to five years to emerge. In fact, it seemed more like a matter of seconds; I felt the vehicle’s vulnerability, the nagging possibility that Miller and Valasek could cut the puppet’s strings again at any time.
The hackers holding the scissors agree. “We shut down your engine—a big rig was honking up on you because of something we did on our couch,” Miller says, as if I needed the reminder. “This is what everyone who thinks about car security has worried about for years. This is a reality.”
“So much of our manufactured environment testifies to carelessness,” Ive says. Things are “developed to be different, not better.”Credit Photograph by Pari Dukovic
I. Launch Day
In recent months, Sir Jonathan Ive, the forty-seven-year-old senior vice-president of design at Apple—who used to play rugby in secondary school, and still has a bench-pressing bulk that he carries a little sheepishly, as if it belonged to someone else—has described himself as both “deeply, deeply tired” and “always anxious.” When he sits down, on an aluminum stool in Apple’s design studio, or in the cream leather back seat of his Bentley Mulsanne, a car for a head of state, he is likely to emit a soft, half-ironic groan. His manner suggests the burden of being fully appreciated. There were times, during the past two decades, when he considered leaving Apple, but he stayed, becoming an intimate friend of Steve Jobs and establishing the build and the finish of the iMac, the MacBook, the iPod, the iPhone, and the iPad. He is now one of the two most powerful people in the world’s most valuable company. He sometimes listens to CNBC Radio on his hour-long commute from San Francisco to Apple’s offices, in Silicon Valley, but he’s uncomfortable knowing that a hundred thousand Apple employees rely on his decision-making—his taste—and that a sudden announcement of his retirement would ambush Apple shareholders. (To take a number: a ten-percent drop in Apple’s valuation represents seventy-one billion dollars.) According to Laurene Powell Jobs, Steve Jobs’s widow, who is close to Ive and his family, “Jony’s an artist with an artist’s temperament, and he’d be the first to tell you artists aren’t supposed to be responsible for this kind of thing.”
One morning in September, Ive was talking with a few friends, including Chris Martin, of Coldplay, and Stephen Fry, the British actor and writer, in a courtyard beside a community-college hall, a few miles from Apple’s headquarters, in Cupertino. He wore pale, wide pants, cut as if for a chef, and tan suède Clarks shoes, and his hair was cropped. He was maintaining a look captured in a Playmobil figure of him, which his design colleagues made as a Christmas present a few years ago. The seven-inch Ive had on sunglasses and carried an off-white Valextra briefcase. A photograph of the gift is the lock-screen image on Ive’s iPhone.
Ive was brushing his hand across the top of his head, and talking quietly. He is impeccably solicitous, with frowns of attention and apologies for lateness or workplace untidiness, and he seems to extend this tone to everyone—including, presumably, to the crew of his twenty-seat Gulfstream GV, which he bought from Powell Jobs after her husband’s death, in 2011. He communicates with his friend Paul Smith, the British fashion designer, largely through postcards that, as Smith recently recalled, contain “words like ‘lovely,’ ‘special,’ ‘so nice’—a language that is particular to his gentleness.”
Later that morning, Apple was announcing new products and services, at the kind of event that the company, like a fashion house, stages a few times a year. Of a thousand attendees expected, a few dozen had been invited to the backstage courtyard. Among the guests were Rupert Murdoch; Kevin Durant, of the Oklahoma City Thunder; Marissa Mayer, of Yahoo; Jimmy Iovine, the C.E.O. of Beats; and the rapper and entrepreneur Sean Combs. (Fry later referred, fondly, to “Snoop Seany Sean,” who was gracious when Fry nearly soaked him with a spilled drink.) That day, a hundred assembly lines in Zhengzhou, China, were turning out still secret new iPhones at a reported rate of seventy-five hundred an hour, and rumors about new Apple products, including a watch, were being posted online at nearly the same pace. Tim Cook, Apple’s C.E.O., was somewhere nearby, preparing to speak to a hall full of enthusiasts and reporters, and to millions online. But Ive’s role was limited largely to drinking coffee in misty sunshine. Jobs excused Ive from most public-speaking duties, and he has held on to the dispensation.
“I’m shy,” Ive said. His London accent is intact after more than twenty years away. “I’m always focussed on the actual work, and I think that’s a much more succinct way to describe what you care about than any speech I could ever make.” He sounded calm, but he was fidgeting with his hands, as if trying to flick gum from his fingertips.
Behind Ive, at a distance that suggested self-exile, was Steve Wozniak, who, in 1976, co-founded Apple with Jobs, and who was wearing a black steam-punk watch the size of an ashtray. (“What is that?” Ive later asked, rhetorically, in mock affront at its design.) A colleague told Ive that, overnight, people had formed lines outside Apple stores, wrongly assuming that new devices would become available that day. Ive recalled the first time he encountered a long queue: his parents took him to the Tutankhamun exhibition at the British Museum when he was five.
The day’s event included a ten-minute film. Ive’s reluctance to speak onstage has been offset by a willingness to appear in scripted videos. These productions—Ive speaking in earnest cadences, his head cocked forward like Pixar’s Anglepoise lamp—have become so well known that ikea recently parodied them, in an ad for its catalogue (“a device so simple and intuitive, using it feels almost familiar”). Such videos used to punctuate Jobs’s onstage message. In the absence of Jobs, they carry the message. Apple’s current leaders aren’t without public-speaking skills, but they can’t match Jobs’s charisma, which was fortified by a hint of menace, and their performances can evoke the awkward informality—the dancing in lanyards—of a corporate retreat. By contrast, the virtual Ive seems to emerge from the same orderly, decontaminated place as an Apple product. He appears “rational” and “inevitable,” to use the typical language. On Apple’s Web page of executive biographies, fourteen men and women give welcoming smiles; Ive, the in-house outsider, faces the camera with album-cover gravity.
The new film did not show Ive’s face, but he had narrated it, and largely directed and edited it. This work was done in Apple’s design studio, which has a core team of nineteen industrial designers whose public recognition—even as their work has become unavoidable—has rarely extended beyond mentions in patent filings and affidavits. In a company with inexhaustible marketing resources, Ive’s authorship of the film suggested fastidiousness about the seductive display of his work. But it was also an assertion of ownership that Jobs himself might have appreciated. Apple’s designers have long had an influence in the company which is barely imaginable to most designers elsewhere. This power “was anointed to them by Steve, and enforced by Steve, and has become embedded culturally,” in the description of Robert Brunner, who gave Ive his first job at Apple, and ran Apple’s design group in the first half of the nineteen-nineties, before this culture took hold. Jeremy Kuempel, an engineer who interned at the company a few years ago, and has since launched a coffee-machine startup, told me that when a designer joined a meeting at Apple it was “like being in church when the priest walks in.” Now, Brunner believes, “Jony has assumed the creative soul of the company.”
J. J. Abrams, the filmmaker and showrunner, is a friend of Ive’s, but he could not attend the September launch, because he was shooting “Star Wars: The Force Awakens,” in London. He later told me that Ive had shared some of the company’s news in advance, and that they had discussed “the fact that we were both working on things that had a level of expectation and anticipation that was preposterous.” If Ive has learned to cope with pre-launch media fuss—snatched photographs of components, mockups of imagined goods—Abrams seems to relish it. As the event in California unfolded, he posted an image to Twitter using the hashtag #AppleWatch: a handwritten card (“Why do I suddenly have this desperate need to own a watch? Damn you, Apple!!!”) lying on a polished surface that seemed to offer the first glimpse of the interior of a new Death Star.
At my first meeting with Ive, a few weeks earlier, he had worn a Jaeger-LeCoultre watch that he and an old friend, Marc Newson, the Australian-born designer, had customized for an auction benefitting Project Red, the charitable organization co-founded by Bono; they made three watches and kept one each; the third sold for three hundred and sixty thousand dollars. But now, in the courtyard of multimillionaires, Ive had a bare wrist, and it would remain so for a few more hours. He spoke of soon arriving at “this rarest of times—when we’re done, and we get to talk about it.” He added, “It’s pretty strange. Where we’re standing, right now, we haven’t talked about it, and we can stand here in a couple of hours, and millions and millions of people will know.” He went on, “You go from something that you feel very protective of, and you feel great ownership of, and suddenly it’s not yours anymore, and it’s everybody else’s. And it’s a very—I think the word ‘traumatic’ is probably overstated, but it’s a really significant point in time.” He smiled. “These are very poignant points in time. It’s so digital. It’s so binary.”
Newson had come to the gathering, and for a while Ive whispered affectionately with him and Powell Jobs. Before going indoors, Ive greeted Powell Jobs’s twenty-three-year-old son, Reed, whose collar-length hair underscored his resemblance to his father at the same age. Ive held him in a hug, and exhaled: “Ahh!”
“We can do this the easy way or we can do this the cute way.”
Inside the hall, Ive took a front-row seat, with Marc Newson on his left and Chris Martin on his right. Tim Cook came onstage. The audience applauded two redesigned iPhones and a new touchless payment system, which was introduced with a film that—like infomercials showing people in catastrophic interactions with Tupperware or garden hoses—may have overplayed the difficulty of taking a credit card from one’s pocket. Then Cook borrowed a phrase of his predecessor’s: “One more thing.” Before long, jewelry was tumbling through white space, and Ive was talking about “beautiful objects that are as simple and pure as they are functional.”
II. The Studio
One morning at Apple’s headquarters, a few weeks earlier, Ive recalled how, in 1997, the company seemed to be dying around him. “Every story you’d read, every morning before coming to work, started with the phrase ‘The beleaguered computer maker, Apple,’ ” he said. Ive was then thirty; after five years at the company, he had become its head of industrial design. “There was a Wired cover that had a big Apple logo with a crown of barbed wire, as thorns, and underneath it just said, ‘PRAY.’ I remember this because of how upsetting it was. Basically saying: either it’s going to just go out of business or be bought.”
The Wired article appeared that June. The next month, Jobs, who had left Apple twelve years earlier, and gone on to launch Pixar and NeXT, returned as Apple’s C.E.O., supplanting Gilbert Amelio. Jobs and Ive had an intense first meeting. Ive said, “I can’t really remember that happening really ever before, meeting somebody when it’s just like that”—he snapped his fingers. “It was the most bizarre thing, where we were both perhaps a little—a little bit odd. We weren’t used to clicking.”
Assuming the worst, Ive had a resignation letter in his pocket. Indeed, Jobs’s initial instinct had been to hire a new designer. He had approached Richard Sapper, who designed I.B.M.’s ThinkPad—a black cigar box. (Sapper was tempted, he told me, a little ruefully, but didn’t want to abandon his I.B.M. contract for a “tiny, tiny company.”) Jobs had also met with Hartmut Esslinger, who, as a consultant, was Apple’s industrial designer in the eighties. Esslinger, in an e-mail, recalled telling Jobs that Apple’s existing team, including Ive, “was very talented and competent if given the right leadership.” Esslinger, who has more design-guru swagger than Ive, also takes some credit for what happened next: he said that he encouraged Jobs to refocus the company on “evolving digital-consumer trends.”
Jobs visited the design studio and, as Ive recalled it, said, “Fuck, you’ve not been very effective, have you?” This was a partial compliment. Jobs could see that the studio’s work had value, even if Ive could be faulted for not communicating its worth to the company. During the visit, Ive said, Jobs “became more and more confident, and got really excited about our ability to work together.” That day, according to Ive, they started collaborating on what became the iMac. Soon afterward, Apple launched its “Think Different” campaign, and Ive took it as a reminder of the importance of “not being apologetic, not defining a way of being in response to what Dell just did.” He went on, “My intuition’s good, but my ability to articulate what I feel was not very good—and remains not very good, frustratingly. And that’s what’s hard, with Steve not being here now.” (At Jobs’s memorial, Ive called him “my closest and my most loyal friend.”)
Ive was sitting in a corner of Apple’s first-floor industrial-design studio, in front of a translucent window that gave a view only of the nodding shadows of tree branches. Steve Jobs’s top-floor corner office, untouched since his death, is one link away, in the campus’s ring of six banal four-story buildings, arranged around a lawn. The campus, on a street named Infinite Loop, was built in the early nineteen-nineties. A covered corridor connects One Infinite Loop (Jobs’s office) and Two Infinite Loop (Ive’s lab). Just before Ive took me into the studio for the first time, he remarked that all the buildings were similarly linked. A colleague corrected him: this was true only of One and Two. Ive said, “Really?” The error suggested something about the design studio’s place in the Apple universe. It also suggested that the layout of a new campus currently being built nearby—a ring-shaped low-rise with a diameter of sixteen hundred feet—might have a largely symbolic connection to workplace togetherness.
An invitation to visit Apple’s studio is rare, and is withheld even from most employees. Inside the door, a ten-foot-long internal vestibule, in stainless steel, serves as a visual air lock. One’s view is largely restricted to the desk of Harper Alexander, an office manager, who—in a corporate culture ruled by reticence—has an unusually lively Twitter presence. (“Playing counting crows and hootie in the Apple design studio. Everyone in here who loves Euro douchepop just literally died.”)
That morning, the douchepop—a mix that included Yaz and The Rapture—was set at low volume, as were the employees, who spoke in murmurs and moved silently on sneakered feet. Later that day, I met Eugene Whang, one of the designers; he referred to a second career as a d.j. and a music promoter, and noted that we were listening to a set that he and a friend had performed at Le Bain, in the Standard Hotel, in New York’s meatpacking district. (It is not enough to have co-created the iPhone.) Whang and his colleagues—they include an Austrian-born surfer, Julian Hönig, who used to design Lamborghinis—tend to be as low-key as their boss, and their fame extends barely beyond the studio door. But their multinationalism, and their lives of individual affluence and shared reputation, would be familiar to soccer players on Europe’s grandest teams. Apple employs three recruiters whose sole task is to identify designers to join the group; they find perhaps one a year. Not long ago, Whang posted online a photograph of a handsome white helicopter, captioned, “The new Mori City Air Service from Narita to Tokyo is amazing. 30 mins total travel time. It’s pricey, but sometimes definitely worth it. The Hermès edition is upholstered in their classic canvas, with leather trim details and calf leather seats.”
Ive, wearing a royal-blue T-shirt, was affable, but there was little trace of English irony. “I think you can reserve that for entertainment,” he later said. “And not practice that professionally.” In our conversations, his manner could sometimes be unsettling for the way it combined the tender attentiveness of a suicide-prevention volunteer—“I was ever so lucky”; “I do hope you have a good flight”—with a keenness to move the conversation from the particular to the general; his replies, searching for the safe ground of a previously expressed thought, often looped and hedged, or drifted off into a sigh. At first attempt, Ive ran through the first twenty-five years of his life in sixty words; he told me which novel he was reading only after designating the answer off the record.
That morning, Ive told me that, before Jobs replaced Amelio, the studio’s work on an iMac-like device “was of no interest to the company.” The comment was surprising: Ive tends to be strenuously courteous toward his employers. (In a 1997 book, he was quoted saying, “Gilbert Amelio gives more support to industrial design than any C.E.O. in Apple’s history.” He also said, “For a designer, there couldn’t be a more exciting place to work at this moment than Apple.”) His public persona is not merely evidence of corporate fealty; he has a serious man’s resistance to perceived trivia, and a genuine discomfort with self-exposure. Yet the effect is the same: in Ive’s view, his personal story is barely worth telling. This habit of rhetorical modesty has lately been complicated by an immodest business truth: more than ever, Ive is the company.
After passing through the vestibule, Ive said, “I can’t emphasize enough: I think there’s something really very special about how practical we are. And you could, depending on your vantage point, describe it perhaps as old-school and traditional, or you could describe it as very effective.” To our left was an open kitchen with tables and benches, a vintage Faema espresso machine, and a wall of books that included “100 Superlative Rolex Watches” and a study of Joe Colombo, the designer best known for his round-cornered Kartell storage carts. The kitchen flowed into an area of individual workstations. To our right was a brightly lit room where a dozen oak worktables stood, in tidy formation, on a polished-concrete floor.
The room is about three thousand square feet, though its outsized reputation has led it to be described as “cavernous.” It ends in a glass wall, behind which stand three eight-foot-high computer-numerical-control (C.N.C.) milling machines that shape plastic and metal to produce models and prototype parts. When Ive designed the space, at the turn of the century, he wanted these machines to be as integrated into the studio as noise and dust pollution allowed. “They make physical objects, and that is what we’re doing,” he told me. Milling machines help turn a studio into a workshop; they reinforce Ive’s view that bad industrial design often starts in ignorance of what a material can and cannot do.
“Excuse me—those performance reviews were supposed to be anonymous.”
The worktables are higher than a desk but a little lower than the Apple Store tables they inspired. This height—arrived at after much reflection—accommodates seated study and standing visits. (Risking self-parody, Ive later referred to the “simplicity and modesty” of the arrangement.) Samsung Electronics sells vacuum cleaners as well as phones, and employs a thousand designers. Apple’s intentions can be revealed in one room. Each table serves a single product, or product part, or product concept; some of these objects are scheduled for manufacture; others might come to market in three or five years, or never. “A table can get crowded with a lot of different ideas, maybe problem-solving for one particular feature,” Hönig, the former Lamborghini designer, later told me. Then, one day, all the clutter is gone. He laughed: “It’s just the winner, basically. What we collectively decided is the best.” The designers spend much of their time handling models and materials, sometimes alongside visiting Apple engineers. Jobs used to come by almost every day. Had I somehow intruded an hour earlier, I would have seen an exhibition of the likely future. Now all but a few tables were covered in sheets of gray silk, and I knew only that that future would be no taller than an electric kettle.
The cloth covering the table nearest the door was curiously flat. “This is actually complicated,” Ive said, feeling through the material. “This will make sense later. I’m not messing with you at all, I promise.”
In an environment of dust sheets and undecorated walls, a bag of Whole Foods nuts, on a shelf, makes a loud claim for attention. But the room’s minimalism derives from nondisclosure more than from dogma. Ive’s aesthetic is not austere: one could think of the work done here as a reticent man’s idea of exuberance, with rapture expressed in the magnetic click of a power adapter. Richard Seymour, a British designer who has known Ive for years, recently referred to his friend’s “emotionally warm modernism.” Clive Grinyer, a friend and former London colleague of Ive’s, said, appreciatively, “He’s always been a bit bling.” Paola Antonelli, the senior curator of design and architecture at MoMA, who has added many Apple products to the museum’s collection, praised an innovation that indicated when a closed laptop was in “sleep” mode: a light glowed on and off twelve times a minute, like a restful person breathing. “Jony knows that I was transfixed,” she said. “They had to abandon it because it kept people awake when it was on the bedside table.” (Apple disputed this explanation.) “It was round and pulsating and it was just amazing.”
A door briefly opened, and I saw flashes of color pinned to a wall. (This, Ive later explained, was the conference room where the Apple Watch film was being storyboarded.) Then we stopped in Ive’s office, a twelve-foot square separated from the studio by a glass wall. On shelves, Ive had set his Playmobil likeness and similar gifts, along with dozens of custom sketchbooks that had padded blue covers and silver edging. On the floor, behind a Marc Newson desk, was a rugby ball. Overlapping framed images leaned against the wall: a Banksy print of the Queen with the face of a chimpanzee, and a poster, well known in design circles, that begins, “Believe in your fucking self. Stay up all fucking night,” and ends, many admonitions later, “Think about all the fucking possibilities.”
That text could be thought of as a supplement to design principles set down by Dieter Rams, the German designer celebrated for pale, clean-lined, Bauhaus-inspired work, largely at Braun. (Ive greatly admires Rams, but his debt to him has sometimes been overstated, and it’s worth noting a difference of manufacturing scale: Rams’s Braun products sold in the thousands, occasionally the millions; Apple has sold one and a half billion things designed by Ive.) In Rams’s formulation, a new object should be innovative, useful, aesthetic, understandable, unobtrusive, honest, long-lasting, thorough, and environmentally friendly, and feature “as little design as possible.” Ive flicked through a sketchbook, giving me time to see that, like Leonardo da Vinci, he sometimes uses brown ink. There was a little drawing of something that may have been a latch and, in tall, skinny script, the words “pretension” and “smart.” On another page—Apple’s competitors may do with this what they like—Ive seemed to have written the word “Airbug.”
Back in the main room, Ive noted that he’d been watching “Moon Machines,” an old Discovery Channel series about the Apollo program. “There was the realization we needed to develop a spacesuit, but it was hard to even know what the goals should be,” he said. And then he linked the studio’s work to nasa’s: like the Apollo program, the creation of Apple products required “invention after invention after invention that you would never be conscious of, but that was necessary to do something that was new.” It was a tic that I came to recognize: self-promotion driven by fear that one’s self-effacement might be taken too literally. Even as Apple objects strive for effortlessness, there’s clearly a hope that the effort required—the “huge degree of care,” the years of investigations into new materials, the months spent enforcing cutting paths in Asian factories—will be acknowledged.
We walked toward a lower table in the corner of the studio. The young computer-design technicians sitting there realized, after a moment’s delay, with nothing said, that they were expected to move. We sat on peculiarly low benches, and two of Ive’s designers joined us. Jody Akana, who is in her thirties, is unusual in the group for having a declared specialty: color. Bart André is fifty, and tops the list of Apple employees with design patents. (Neither had ever previously spoken to a journalist.) “I watched the spacesuit one last night,” Ive told André.
“They play together, they work together, and they protect each other,” Robert Brunner, the former Apple design chief, later said of the team. At one of our meetings, Ive reminded me of a short article that Bono wrote about him in Time. It said, “To watch him with his workmates in the holy of holies, Apple’s design lab, or on a night out is to observe a very rare esprit de corps. They love their boss, and he loves them. What the competitors don’t seem to understand is you cannot get people this smart to work this hard just for money.” Ive, Bono’s friend, described these comments as “shockingly perceptive”—which is an unusual response to praise, even shared praise. But the strength, and the professional advantage, of the team’s solidarity is one of Ive’s recurring themes. He was determined to counter “spiteful,” if infrequent, claims that the studio’s spirit is not as collegial as it looks. Doug Satzger, who left Apple in 2008, and now runs industrial design at Intel, told Fast Company that “Jony has a very political agenda when it comes to his positioning within the company. He would tell me, ‘Anytime you meet with Steve, I gotta know.’ ” (Satzger declined to comment.)
Ive said that, in fifteen years, only two designers have left the studio—one of them because of ill health. He regards this as a clinching argument about harmoniousness. It isn’t: many people put up with unhappy workplaces. But even Satzger’s public remarks have been largely admiring. It’s easy to imagine that the studio’s hushed zeal might strike some as claustrophobic and priggish. And it might be unnerving when, in company negotiations, a designer’s composed bearing carries steely intent. (Richard Howarth, a veteran Ive lieutenant, soft-spoken and British, is considered “a badass, in terms of driving things,” I was told, half-jokingly. “He’s feared.”) But it’s hard to mount a challenge to the consensus that Ive, however vexed and self-conscious, is a good egg. He has the soreness of a man who took all but one vote in a popularity contest.
Team members work twelve hours a day and can’t discuss work with friends. Each project has a lead designer, but almost everyone contributes to every project, and shares the credit. (Who had this or that idea? “The team.”) Ive describes his role as lying between two extremes of design leadership: he is not the source of all creativity, nor does he merely assess the proposals of colleagues. The big ideas are often his, and he has an opinion about every detail. Team meetings are held in the kitchen two or three times a week, and Ive encourages candor. “We put the product ahead of anything else,” he said. “Let’s say we’re talking about something that I’ve done that’s ugly and ill-proportioned—because, believe you me, I can pull some beauties out of the old hat. . . . It’s fine, and we all do, and sometimes we do it repeatedly, and we have these seasons of doing it—”
“I had one last week,” Akana said.
“Which one?” he asked.
“The packaging thing,” she said.
“That’s true,” Ive said, laughing. “It was so bad.”
Akana had proposed that an Ultrasuede cloth inside the box for a gold version of the Apple Watch should be an orangey-brown. Ive had objected with comic hyperbole, comparing it to the carpeting in a dismal student apartment. In the same amused spirit, Akana had then asked, “So you don’t like it?”
Jobs’s taste for merciless criticism was notorious; Ive recalled that, years ago, after seeing colleagues crushed, he protested. Jobs replied, “Why would you be vague?,” arguing that ambiguity was a form of selfishness: “You don’t care about how they feel! You’re being vain, you want them to like you.” Ive was furious, but came to agree. “It’s really demeaning to think that, in this deep desire to be liked, you’ve compromised giving clear, unambiguous feedback,” he said. He lamented that there were “so many anecdotes” about Jobs’s acerbity: “His intention, and motivation, wasn’t to be hurtful.”
Even if Jobs had rescued him from vagueness, it was odd for Ive to bring this up now, immediately after I’d learned how to reject a color without causing injury. “I’ve seen Jony deeply frustrated, but I’ve never seen him rant and rave,” Laurene Powell Jobs said, and she added, laughing, that she would not have said the same of her husband. (And it’s hard to imagine Ive using a disabled-parking spot, as Jobs often did, long before he was unwell.) Ive likes to be liked; the story seemed to be a preëmptive defense of Jobs veiled as self-criticism. It was also an indirect response to Walter Isaacson’s 2011 biography of Jobs, which, though not hostile, included examples of unkindness. In a later conversation, Ive said that he’d read only parts of the book, but had seen enough to dislike it, for what he called inaccuracies. “My regard couldn’t be any lower,” he said, with unusual heat.
“We’re editing our collection of plastic bags.”
Ive went off to make some calls, and André described his own routine: he tends to arrive at five or six in the morning, and often then designs geometrically complex objects that he asks the machinists to mill. He called it a hobby, but, as Akana explained, “We’ll have a meeting about a speaker-hole pattern, or something, and Jony will say, ‘Bart, can you get your box of patterns?’ ”
André agreed to fetch, from his desk, something that he had been using as a coaster. Made of hard white ABS plastic—the material of Legos, and of thousands of Apple studio models a year—it was a disk punctured by evenly arranged holes. Or, as André put it, “There’s a hexagon pattern of negative shapes that are subtracted from the material from one side, and then there’s the same pattern, subtracted from the material from the other side. But it’s offset, so that the intersection between the two subtractions makes interesting shapes.” He rubbed it on his shirt, to remove coffee stains, before passing it to me.
III. Managing Newness
Three years ago, Ive’s responsibilities expanded to include software as well as hardware. He took charge of what Apple calls Human Interface: typefaces, icons, swipes, taps. In 2013, the company released the iOS7 operating system for the iPhone and the iPad, and the overhaul included a new range of sounds for incoming calls, texts, and e-mails. Before, the alerts had mostly a strained, jokey relationship with the real world, as suggested by such names as Duck, Choo Choo, and Doorbell. iOS7 introduced refined snatches of electronica created, in part, by Hugo Verweij, a Dutch sound designer who, before being hired by Ive, had a Web site selling “minimalist ringtones.” (On his blog, Verweij had expressed bafflement with Apple’s “loud and crappy” sounds.) Some Apple customers may have found the new tones unappealing—too modish, or too European—and they may have switched back to the goofy, “classic” sounds that had been relegated to a lower-rung menu. But others may have had the thought, or the half-thought, that the sounds made the phones more coherent—a more natural accompaniment to glass, aluminum, and Helvetica Neue.
Ive manages newness. He helps balance the need to make technological innovations feel approachable, so that they reach a mass market—Choo Choo—with the requirement that they not be ugly and infantile. Apple has made missteps, but the company’s great design secret may be avoiding insult. Antonelli, of MoMA, described Apple’s design thoughtfulness as “a sign of respect,” and added, “Elegance in objects is everybody’s right, and it shouldn’t cost more than ugliness.”
“So much of our manufactured environment testifies to carelessness,” Ive said, as he and I were driven, early one evening, from the flat sprawl of Cupertino to a hilltop in central San Francisco, where he lives in a two-bedroom house with his British wife, Heather, a former arts administrator, and their ten-year-old twin boys, who pronounce “aluminum” in the English way, and have strict rules about screen time. (A few years ago, the Ives bought a nineteen-twenties mansion in Pacific Heights, with striking views, and Ann Getty and Larry Ellison as neighbors. The house is undergoing a seismic renovation. The Ives also own a beach house on the Hawaiian island of Kauai.)
We were in the fast lane of I-280, in squinting low sunshine. When I asked for examples of design carelessness, Ive cranked the conversation back to Apple. He has the discipline to avoid most indiscretions, but not always the facility to disguise the effort. “At the risk of sounding terribly sentimental, I do think one of the things that just compel us is that we have this sense that, in some way, by caring, we’re actually serving humanity,” he said. “People might think it’s a stupid belief, but it’s a goal—it’s a contribution that we can hope we can make, in some small way, to culture.”
Ive acknowledged that he and Marc Newson, who recently joined Apple as a London-based employee, could “incite ourselves to a sort of fever pitch” of design distress; they’ll complain about things “developed to a schedule, to a cost,” or “developed to be different, not better.” He and Newson are car guys, and they feel disappointed with most modern cars; each summer, they attend the Goodwood Festival of Speed, where vintage sports cars are exhibited and raced in the South of England. “There are some shocking cars on the road,” Ive said. “One person’s car is another person’s scenery.” To his right was a silver sedan with a jutting lower lip. Ive said, quietly, “For example.” As the disgraced car fell behind, I asked Ive to critique its design: “It is baffling, isn’t it? It’s just nothing, isn’t it? It’s just insipid.” He declined to name the model, muttering, “I don’t know, I don’t want to offend.” (Toyota Echo.)
We were in Ive’s black Bentley, which is as demure as a highly conspicuous luxury car can be. The hood barely sloped, and it met the car’s front end at a tightly curved corner that mirrored the iPhone 6 in Ive’s left hand. We were in the back seat: Ive has reluctantly accepted the services of a driver. Ive said to him, “It’s just over a year, isn’t it, Jean?”
Ive would prefer an unobserved life, but he likes nice things. He also has an Aston Martin DB4. He acquired his first Bentley, a two-door model, ten years ago, after an inner zigzag between doubt and self-justification. “I’ve always loved the big old-school square Bentleys,” he said. “The reasons are entirely design-based. But because of the other connotations I resisted and resisted, and then I thought, This is the most bizarre vanity, because I’m concerned that people will perceive me to be this way—I’m not. So I’m going to—” A pause. “And so I am uncomfortable about it.” Jeff Williams, Apple’s senior vice-president of operations, drives an old Toyota Camry. Ive’s verdict, according to Williams, is “Oh, God.”
The view from the Bentley was of dry, yellow fields. “Isn’t this beautiful?” Ive said. “Long shadows, and the sun just tripping over the tops of the trees.” He spoke of landscapes in Marin County, north of San Francisco, that evoke the southwest of England: “Like Devon, some of it, isn’t it? Cornwall. Exmoor.”
Ive’s parents now live in that part of England, and Ive, too, once had a house there, but he grew up in Chingford, in London’s middle-class northeastern suburbs. There was a Rams-designed Braun MPZ 2 Citromatic juicer in the kitchen. “No part appeared to be either hidden or celebrated,” he later wrote. He was exposed early to tools. “I was so incredibly lucky to grow up in the context of workshops,” he told me. He acquired “a natural understanding that everything here”—highways, bridges, Toyotas—“is made, and is the consequence of multiple decisions.” His roots are working class: his paternal grandfather and great-grandfather were skilled metalworkers. His father, Michael, now retired, was a secondary-school teacher of design and technology, and then a government adviser on design education. Ive’s mother was a theology teacher and, later, a therapist; his younger sister became a consultant for nonprofits in London. Marc Newson sees an economic similarity between Ive’s upbringing and his own. “Neither of us came from particularly privileged backgrounds,” he said, when we met. “A lot of what I’ve done has been an effort to try to have the things that I didn’t own when I was a child.” Newson was carrying a six-thousand-dollar Louis Vuitton backpack, of his own design. Ive, the owner of a jet, was twenty-one before he experienced air travel.
Michael Ive said that the scale of his son’s talent manifested itself in childhood. He recalled an ingenious obstacle course, in wood and cardboard, for a pet hamster, and a drawing of a scuba diver that was “so accurate in its perspective, with an astonishing sense of movement.” When Jonathan was thirteen, the family moved to Stafford, in the Midlands. At this age, Ive said, he was nicknamed Tiny, because “I was as big as I am now.” He was selected to play rugby for his county. When necessary, he has been able to access aggression. “You don’t play politely,” Ive later explained, laughing. “But you play as a team, and if you don’t play hard your team’s going to get hurt.” At school, he met Heather Pegg, his future wife, and wore his hair in a post-punk mullet.
In 1985, Ive began studying industrial design at Newcastle Polytechnic (now Northumbria University). He had the profound experience of using a Mac for the first time: “I had a sense of the values of the people who made it.” He had two half-year internships at a London design firm, and his adeptness was embarrassingly evident: according to Clive Grinyer, who met him in that office, Ive was given some of the company’s most important work. Grinyer recalled visiting Ive in Newcastle: “I stayed the night in his living room, surrounded by hundreds of foam models—all white, of course. There was that little tiny difference between each one.” He called Ive “the most focussed human being I’ve come across.” This is also Ive’s description of Jobs.
Ive told me that, since childhood, he has been “consumed with work.” It’s unrewarding to question him about the movies, books, and night clubs of his youth, although at some point he acquired an abiding taste for dance music, and he has since become friends with John Digweed, the British d.j., and the members of Massive Attack. (He is also a friend of Yo-Yo Ma.) In the summer of 1987, midway through college, he married Heather, who was studying English literature at Newcastle University.
“One of you will always wonder if this could have been settled differently.”
He won a national student design competition two years running, once for a white desk phone that had a handset with a long handle, like a lorgnette. He pooled two travel scholarships and, in the summer of 1989, after he had received the highest category of degree, he travelled in the United States. Robert Brunner had recently founded a design consultancy, Lunar, in San Francisco. He wanted to hire Ive moments after meeting him: Ive was “a sweet, enthusiastic guy,” and his portfolio was extraordinary, in part because “he had figured it all out.” Although people may think of industrial design “as the concept and renderings and models and all the creative stuff,” Brunner said, it’s ultimately about “delivering something.” Ive had brought a model of his desk phone, which he took apart to show how the internal components coexisted. The model’s outer casing was the exact thickness that it would be in a finished phone. “You never see that from a student,” Brunner said.
Ive could not move to California; he had already committed to work at the company where he had interned. A little later, he became the third partner in Tangerine, a London design consultancy co-founded by Grinyer. His projects included a long-toothed barber’s comb embedded with a level, for cutting flattops. “I think I’m just a dreadful businessperson,” Ive said, on our drive: a consultant is forever hustling for new work, and can never have the same impact on a company’s design direction as an in-house practitioner. And the work may feel purposeless: as Ive had put it, “I don’t think the world needs another microwave oven.”
In the early nineties, near the end of his time at Tangerine, Ive worked with two key clients. Ideal Standard, a British bathroom-ceramics manufacturer, commissioned a sink, a toilet, and a bath. In the Bentley, Ive drew the sink in my notebook: a half-oval atop a column that, as it tapered down, angled away from the wall. “It was a very, very simple bowl, and the rim was thick but it twisted,” he said. “It was sort of tipped open at the front.”
Ive also designed a tablet computer. In 1989, Brunner had joined Apple, to lead its design team; by 1991, the company was close to releasing its first laptop, the PowerBook 100. In a commission whose true purpose was to persuade Ive to take a job at Apple, Brunner asked Tangerine to explore other concepts in mobile computing.
Ive visited the headquarters of Ideal Standard and Apple, and recognized the contrast in his tasks. In the case of the sink, “the form wasn’t following the function,” he told me. “The form was the function. It functioned as a washbasin because of the shape.” Ive made this sound equally restricting and ennobling. “You had a real sense of your grounding in ancient history,” he said. “There was such a purity to the problem.”
At Apple, “the products were incredibly complex, and you realized that you had this dizzying liberty,” he said. “Of course, you were trying to figure out an architecture, and form, that addressed certain issues of function.” But an Apple product could take many different shapes, some of which would be “completely unhelpful in helping you understand what the object was.” Although there had long existed tools and machines whose function might puzzle a non-specialist, the integrated circuit had introduced a new level of inscrutability, where “people could look at an object and have not the first clue what it was and how it worked.” His tablet concept, the Macintosh Folio, had a stylus and an adjustable angled screen, and carried the suggestion of a drawing board.
In the spring of 1992, before a general election that the Labour Party was expected to win, after thirteen years of Conservative Party rule, Tangerine presented its bathroom at Ideal Standard’s headquarters, in Hull. Grinyer is still annoyed that the company rejected it. One complaint, he recalled, was that if the sink’s column fell it might kill a child; he thought that the column shared this attribute with other big ceramic objects.
The Tangerine partners then visited Apple in California. When they landed back in London, they were greeted by the news that the Conservatives had won. “It was fucking depressing,” Grinyer recalled. “And Jon does like nice weather.”
Ive moved to San Francisco that September. Not long afterward, he bought a yellow Saab convertible. In Silicon Valley, he responded to “a completely unaffected, completely authentic optimism.” He told Stephen Fry that he had discovered, in America, “a conspicuous lack of cynicism, and skepticism.”
The sun had set by the time we reached his house. “Thanks ever so much, Jean,” Ive said. He unlocked a wooden gate, apologizing for the darkness.
Since joining Apple, Ive has occasionally taken on outside projects. In 2001, he created a white polystyrene box to house a book by Paul Smith. In 2013, an aluminum desk that Ive and Newson designed for the Project Red auction sold for $1.7 million. And Ive once sat next to J. J. Abrams at a boozy dinner party in New York, and made what Abrams recalled as “very specific” suggestions about the design of lightsabres. Abrams told me that “Star Wars: The Force Awakens” would reflect those thoughts, but he wouldn’t say how. After the release of the film’s first trailer—which featured a fiery new lightsabre, with a cross guard, and a resemblance to a burning crucifix—I asked Ive about his contribution. “It was just a conversation,” he said, then explained that, although he’d said nothing about cross guards, he had made a case for unevenness: “I thought it would be interesting if it were less precise, and just a little bit more spitty.” A redesigned weapon could be “more analog and more primitive, and I think, in that way, somehow more ominous.”
Over the years, Laurene Powell Jobs has consulted Ive about eyeglasses, flatware, and the proper height of countertops. “He’s so good on proportion and dimension,” she said. “Really, if you ever need buttons for things designed, for doors or lights, you should just stay in touch with him.” We were in the offices of the Emerson Collective, her education-oriented nonprofit, in Palo Alto. She protected an Arne Jacobsen conference table with two felt coasters: one for her coffee cup, and the other for its plastic lid.
Steve Jobs, like Ive, grew up with a father who could build things. The son became a discriminating, difficult critic of his manufactured environment. Powell Jobs, who has an open, amused manner, said, “I never thought about a sconce before I met Steve. Steve would have a definite point of view about this ceiling. And I learned about mullions.” She was looking at the window. “These mullions are quite thick, and probably overly so.”
For years, the family’s Palo Alto home was underfurnished; Jobs tore photographs of things he liked out of magazines or books, but didn’t buy them. He often complained—“You don’t want to know,” Powell Jobs said—about one or other switch ruining the experience of his Mercedes. He craved products that didn’t force adjustments of behavior, that gave what Powell Jobs called a “feeling of gratitude that someone else actually thought this through in a way that makes your life easier.” She added, “That’s what Steve was always looking for, and he didn’t find it until he worked with Jony. . . . They were really happy, they relished each other.”
Toward the end of his life, Jobs told Walter Isaacson, “If I had a spiritual partner at Apple, it’s Jony. Jony and I think up most of the products together and then pull others in and say, ‘Hey, what do you think about this?’ He gets the big picture as well as the most infinitesimal details about each product. And he understands that Apple is a product company. He’s not just a designer. That’s why he works directly for me. He has more operational power than anyone else at Apple except me.” Richard Seymour, the British designer, described the bond between Jobs and Ive as one “between a savant-level aesthete and an incredible craft-capable practitioner.” According to Powell Jobs, “Steve wasn’t someone who sketched stuff. So he never felt that he actually designed everything. But I think that they both felt like things were made possible because of the two of them.” (Jobs and Ive had different dispositions, but perhaps shared a lack of social smoothness, and it seems fitting that one of their great joint achievements was to give digital distractions to people forced to ride in elevators with nodding acquaintances.)
I had previously asked Ive about the rounded corners and edges that have long helped distinguish an Apple product from a ThinkPad or a book. (As Apple’s product range has narrowed to a series of flat rectangles, these transitions have become a surviving zone of pure industrial design.) On a day when Ive was so exhausted that it seemed possible he might fall asleep while talking, he became animated when describing the “primitive” design geometry that was usual before the computer era—essentially, two straight lines joined by a fragment of a circle. He then spoke of the opportunities that now exist, if the material permits, to take a more elegant path from one line to another; he talked of tangency breaks and Bézier surfaces. When I mentioned this to Powell Jobs, she cried out, “Yes! That is such a breakthrough, I forgot about that.” For each product, Jobs and Ive would discuss corners “for hours and hours.” She later noted that she and Ive share a taste for Josef Frank, the Austrian-Swedish designer of rounded furniture and floral fabrics, who once announced, in a lecture, “No hard corners: humans are soft and shapes should be, too.”
Clive Grinyer visited Cupertino in the mid-nineties, before Jobs returned. Ive “was detailing printer lids,” he said. “He was close to leaving. And, good Lord, if he had actually left, the world would be entirely different.” Recalling this time, Michael Ive said, “Part of me thought, Oh, good, we’ll see him at home again.” Jonathan Ive has little appetite for discussing this period. He worked so hard that Brunner worried about his health; his designs—notably, the second iteration of the Newton personal organizer and, later, the Twentieth Anniversary Mac—were, in Brunner’s admiring description, “somewhat expressive, but still fairly tight and fairly crisp.” At the start of 1996, Brunner left Apple for Pentagram, the international design firm. He recommended Ive as his successor, but, later, he also tried to tempt him away. “I would have loved to have him as a partner at Pentagram, and I told him that,” Brunner said. “But he was ‘I’ve got to wait this out and see where it goes.’ ”
Ive had been in charge for two and a half years when the iMac appeared, in the summer of 1998. Jobs later took much of the credit for its conception, although most other accounts, including Ive’s, suggest that the studio had come up with something quite like the iMac before his return. According to Ive, Jobs said, “Make it lickable.” (Craig Federighi, the senior vice-president of software engineering, attended a meeting where executives were shown a late iMac prototype. “Jony was showing off the case,” he recalled. “Steve was poking at the seams, and turning to Jony: ‘Maybe we could do something with the edge.’ ”) The computer’s design had the giddiness of a pardoned prisoner. At Braun, Dieter Rams had relieved consumer electronics of the need to pose as furniture. A radio could be a box. Apple’s instinct, at this moment, was to do the reverse: to domesticate a machine still largely associated with technical tasks and the workplace. (A few years earlier, in a concept design for an all-in-one computer, Ive had hidden its screen behind credenza doors, which is about as close as hardware comes to a quacking ringtone.) The computer, first sold in food-dye blue, had a handle, and curves that cheerfully acknowledged its unwieldy main component, a cathode-ray tube.
The iMac, relaunching Apple, fully launched Ive. For more than a decade, Jobs and Ive lunched and travelled together. Jobs liked to tease him for what he saw as Britain’s imperial delusions—“All hat and no cattle,” in Powell Jobs’s summary—but Ive told me that, on one visit to the U.K., he and Jobs spent a morning with Prince Charles, at Highgrove, his country house. Bob Mansfield, a former senior hardware engineer at Apple, who is now semi-retired, recently described the pique that some colleagues felt about Ive’s privileged access. As he put it, “There’s always going to be someone vying for Dad’s attention.” But Mansfield was grateful for Ive’s cool handling of a C.E.O. who was “not the easiest guy to please.” Mansfield’s view was “Jony puts up with a lot, and, as a result of him doing it, people like me don’t have to.”
Ive’s dominance wasn’t immediate. Michael Ive recalled a conversation he had with his son in 2001: “ ‘It’ll have a thousand songs, Dad.’ I said, ‘Who wants a thousand songs?’ He said, ‘You’ll see.’ ” Tony Fadell, a former Apple engineer who can take much of the credit for the iPod’s functionality, was recently quoted by Fast Company as saying, “We gave it to Jony to skin it.” That is, Ive’s contribution was to combine, as elegantly as possible, elements decided largely by engineers and others: a battery, a disk drive, an L.C.D. screen, a track wheel. Fadell went on to found Nest, which was later bought by Google; he recently took charge of Google Glass. His phrase may have been strategically irreverent—“We’ve never skinned anything,” Tim Cook told me in response—but it contained at least a partial truth. Ive gave the music player an irresistible white-and-silver form, causing a generation of designers to endure clients asking for the “iPod version” of this or that. (Richard Seymour, in London, recalled a meeting about the iPod of moisturizers.) But the industrial-design studio was not yet the company’s central workshop.
A few years later, in 2004, a visitor to the studio might have noticed a rudimentary, oversized touch-responsive screen lying on a table. “It was very crude, involving projectors,” Ive said. The studio hadn’t invented the essential technology—nor, indeed, had Apple engineers—but the designers helped guide it to market, over years. Ive was now involved “in the fundamentals of the products—how to build them efficiently, the technology, how to cool them,” as Bob Mansfield put it. Ive told me that he initially pressed for a tablet, then agreed with Jobs that a phone should come first: a tablet would have presented consumers with a new category of machine, and a new way of communicating with a machine, all at once. By the time the iPhone was launched, in 2007, Ive had become “the hub of the wheel,” Mansfield said.
Typically, Robert Brunner explained, design had been “a vertical stripe in the chain of events” in a product’s delivery; at Apple, it became “a long horizontal stripe, where design is part of every conversation.” This cleared a path for other designers. In 2007, Brunner formed his own consultancy, Ammunition, and began working with Beats, a new headphone company founded by Jimmy Iovine and Dr. Dre. Brunner’s firm was integrated into the Beats process to a degree that was made possible, he said, by Apple’s example. Ive, Brunner said, had “single-handedly elevated our craft to a level that it’s never been at before.”
Ive’s studio assumed power from manufacturers as well as from engineers. Jeff Williams, the senior vice-president, recalled an early iMac revision. “We announced it, and it was beautiful,” he said. “But we couldn’t figure out how to produce them.” Ive and Dan Riccio, now Apple’s senior vice-president of hardware engineering, spent eight weeks at LG Electronics, the computer’s South Korean manufacturer. “The folks at LG were doing a lot of the designing for us,” Riccio said. “Today, we do it a hundred per cent in-house.”
Apple’s designers still visit factories, but a final prototype part from Cupertino is not the start of a conversation; it’s the part. Ive gave me a tour of the area in the studio behind the glass, where, beyond the milling machines, there’s also a color lab. He said, “Years ago, you thought you’d fulfilled your responsibility, as a designer, if you could accurately define the form”—in drawings or a model. Now, Ive said, “our deliverable just begins with form.” The data that Apple now sends to a manufacturer include a tool’s tracking path, speed, and appropriate level of lubricant. Ive noted that the studio’s prototyping expertise creates the theoretical risk of beautiful dumb ideas. “There are some people who can draw something that’s fundamentally ugly, but draw it—hint at detailing—in such a way that it’s seductive.” Three-dimensional models could be equally misleading. “What we try to do is see beyond our ability to implement, beyond our ability to detail.”
One afternoon, Ive and Bart André removed the bottom panel of a MacBook laptop, revealing black and silver components arranged, with unnecessary orderliness, on a matte black circuit board. Ive looked down happily. “This is such an extraordinarily beautiful thing,” he said. André noted that, in a competitor’s computer, the board would be green. He sounded embarrassed on behalf of that other machine. On the same table was a plastic model of an existing Apple headphone—an EarPod—the size of a golf driver.
The company’s process, which is enabled by almost limitless funds, and by sometimes merciless pressure on suppliers and manufacturers, also provides a layer of commercial armor plating: an Apple object is “manufactured in a way that makes it harder to copy,” Paola Antonelli said. “That’s the genius. It’s not only the formal effect.” When, in 2007, Robert Brunner first saw a MacBook’s “unibody” housing—made, unprecedentedly, out of a milled block of aluminum—it was a “mind-blowing epiphany,” he said. Apple “had decided that this was the experience they wanted, so they went out and bought ten thousand C.N.C. milling machines.” (Apple didn’t confirm that figure, but Brunner was not being hyperbolic.) Soon after the iPhone débuted, Brunner said, Ammunition was approached by “a very large Korean company” to create a touchscreen competitor: “They wanted us to do it in six weeks.” He laughed. “We were, like, ‘You don’t realize, this was years. This was years of a lot of very good people.’ ”
One day, I joined a few Apple designers in the studio kitchen, and asked them how they had registered the world’s embrace of their products. They seemed reluctant even to acknowledge it; they made the studio sound happily isolated, like a spa or a Scandinavian prison. “It’s not like the weight of the world’s on our shoulders,” Richard Howarth, the British designer, said. “Jony set it up so that it’s a little—it’s freer than you might imagine.”
Evans Hankey, a design-team member, added, “Most of the pressure comes, I think, from us.” She said that an existing product is often set alongside a model of a potential successor, to see if “the one that we’ve been enjoying for a couple of years or so—if it just feels really old and kind of stodgy, and the new one feels just amazing.” (The designers are not on the same clock as their customers, so that moment may arrive when the stodgy item is first arriving in stores.) Once a new model feels “inevitable,” Hankey said, “we know we have a lot to do, but at least the foundation is solid.”
Hankey’s words were a reminder of the difficulty in obeying Dieter Rams’s commandment about long-lasting design. In 1973, a Sony ad announced, “This could be the tape deck you’ll leave your great-grandson.” That line, similar to the theme of Patek Philippe ads, may have been wishful, but it was not yet an absurd way to talk about consumer electronics. Today, Apple’s designers, like their competitors, make machines that are almost disposable: the screens crack; the processors become outmoded. I asked if this caused discomfort, and there was a pause. Whang, the d.j., mentioned a friend who still uses a first-generation iPhone. “It’s super banged up, but it’s absolutely fine,” he said, as if the device were a war photographer’s scuffed Leica. “So the stuff absolutely lasts.”
Earlier, Ive had said that he wouldn’t trade reach for permanence. The studio’s perpetual advancements improved “the quality of life for millions and millions and millions of people.” To decelerate—“to say, ‘There you are, it’s done’ ”—would make his professional life simpler. But that, Ive said, would be “really selfish of me.”
IV. A Tap on the Wrist
I asked Jeff Williams, the senior vice-president, if the Apple Watch seemed more purely Ive’s than previous company products. After a silence of twenty-five seconds, during which Apple made fifty thousand dollars in profit, he said, “Yes.”
In 2007, the year of the iPhone launch, the Ives bought an eleven-bedroom seventeenth-century house, with a lake, in rural Somerset, in the West of England. Ive had been at Apple for fifteen years; his children were nearing school age. When Ive and his wife were photographed among the tanned and lacquered guests at San Francisco fund-raisers, they looked palely handsome and a little puzzled, as if misdirected from the set of a Jane Austen adaptation. At the time, Michael Ive hoped that the Somerset house presaged a permanent return. He told me that he had learned not to ask three questions: “When are you coming back to England?”; “What are you working on?”; “Planning any more kids?”
“When were you planning to tell me about Hell?”
According to Clive Grinyer, Ive had by then considered returning to the U.K., entering a “magnificent early retirement” in which he worked on “luxury items with Marc.” As Grinyer recalls his conversations with Ive, Apple’s success, and Jobs’s worsening health, revised such plans. Apple sold six million phones in the first year. By 2012, the company was selling more than a hundred million a year. In the same period—during which Apple launched the iPad and the MacBook Air—the company’s valuation quadrupled. “The iPhone just seemed to change the entire world,” Grinyer said. “I think he is burdened by it. He’s got no choice, the poor guy. He really has to see it out, and I know it wasn’t his plan. Which is not to say he’s not enjoying it.” By the spring of 2011, the Somerset house was back on the market. (Ive’s former guesthouse—limestone flooring, double Neff oven—is available for short-term rentals.)
Ive told me that he never planned to move: he and his wife bought the house for family vacations, and sold it when it was underused. But he also connected the sale to what he called inaccurate reporting, in the London Times, in early 2011, claiming that Apple’s board had thwarted his hope of a relocation; he did not want to be shadowed by gossip. In 2012, Ive was knighted in Buckingham Palace; by then, he and his wife had become U.S. citizens, although they did not relinquish their British passports.
Jobs was given a diagnosis of pancreatic cancer in 2003. Isaacson reported that, in 2009, when Jobs was hospitalized for a liver transplant, and barely able to speak, he critiqued the design of an oxygen mask. Jobs came back to work, and later hosted the launch of the iPad. But in 2011 he took a leave of absence from which he never fully returned. Ive was a frequent visitor to the Jobs home, and was there, on an afternoon in October, when Jobs died.
At Jobs’s memorial, which was held on the lawn at Infinite Loop, Ive said, “Steve used to say to me—and he used to say this a lot—‘Hey, Jony, here’s a dopey idea.’ And sometimes they were: really dopey. Sometimes they were truly dreadful. But sometimes they took the air from the room, and they left us both completely silent. Bold, crazy, magnificent ideas. Or quiet, simple ones which, in their subtlety, their detail, they were utterly profound.” Ive said to me, “I couldn’t be more mindful of him. How could I not, given our personal relationship, and given that I’m still designing in the same place, at the same table, where I spent the last fifteen years with him sat next to me?”
The Apple Watch—the first Apple device with a design history older than its founder, or its designer—was conceived “close to Steve’s death,” Ive said. It’s hard to build a time line of this or any other Apple creation: the company treats the past, as well as the future, as its intellectual property. But, in 2011, there may have been a greater appetite than usual for investigations of new products. One could imagine that executives were eager to act, in anticipation of grief, market upheaval, and skeptical press. (The Onion: “Apple Unveils Panicked Man with No Ideas.”) Cook said, “We were looking at multiple categories of products, and thinking about which ones to do.” The company began developing the iPad Mini. Before the end of the year, prototype ancestors of the iPhone 6 were lined up in the studio, with screen sizes at “every point-one of an inch, from four all the way through to well over six.” (Earlier, the studio had designed a larger iPhone based on the architecture of the iPhone 4, but, as Ive recalled, it was “clunky” and “uncompelling.”)
I had wondered if the watch project, and Ive’s software role, could be seen as a way for Apple to thank and secure Ive: handcuffs in yellow gold and rose gold. “I never thought of that, to be honest,” Cook said. “I think Jony really loves Apple—loves being here and loves the products.” He added, “The driving force was that our products would be much better.” If Jobs and Ive had a father-son dynamic, Ive and Cook seem like respectful cousins. Cook said that Ive was “extremely supportive” both before and after he publicly announced, last fall, that he was gay: “When you do something like that, there’s a group of people that throws stones.” He went on, “It’s been great having people who remind you of all the good in it.”
Ive collected watches, and he had often discussed watch design with colleagues and with Newson, who in the nineties had founded his own watch company, Ikepod. “The job of the designer is to try to imagine what the world is going to be like in five or ten years,” Newson told me. “You’re thinking, What are people going to need?” In 2011, largely thanks to advances in the miniaturization of technology, the answer seemed to be a wearable notification device paired to a phone—making it yet simpler to exchange messages of love, or tardiness. That summer, Google made an eight-pound prototype of a computer worn on the face. To Ive, then unaware of Google’s plans, “the obvious and right place” for such a thing was the wrist. When he later saw Google Glass, Ive said, it was evident to him that the face “was the wrong place.” Cook said, “We always thought that glasses were not a smart move, from a point of view that people would not really want to wear them. They were intrusive, instead of pushing technology to the background, as we’ve always believed.” He went on, “We always thought it would flop, and, you know, so far it has.” He looked at the Apple Watch on his wrist. “This isn’t obnoxious. This isn’t building a barrier between you and me.” He continued, “If I get a notification here, it will tap my wrist”—with silent vibrations. “I can casually look and see what’s going on.” We were in a conference room at One Infinite Loop, a few doors from Jobs’s old office, and I noticed that, at this moment in the history of personal technology, Cook still uses notifications in the form of a young woman appearing silently from nowhere to hold a sheet of paper in his line of sight.
In the fall of 2011, Ive said, a watch conversation became a formal watch project, albeit one that was “still tentative and very fragile.” He made the moment sound both unremarkable (“We explore a lot of things, and we’re resigned to the fact that most of them don’t continue”) and portentous (“It’s not very often that we start something that’s an entirely new platform”). When Ive, in discussing this work with me, referred to such topics as the evolution of sewn pockets, it was easy to detect his pleasure in being answerable to history. Ive may or may not have longed for Somerset, but, after two decades in design’s New World, he’d given himself a task with some Old World constraints. He invited historians and astronomers to give lectures in the studio.
At first, the designers put little on paper. After years of collaboration, “we just get it,” Ive said. “We know exactly what somebody means.” They first discussed the watch’s over-all architecture, rather than its shape. Ive’s position was that people were “O.K., or O.K. to a degree,” with carrying a phone that is identical to hundreds of millions of others, but they would not accept this in something that’s worn. The question, then, was “How do we create a huge range of products and still have a clear and singular opinion?”
If variety was a perceived necessity, it was also an opportunity. “We could make aluminum, and stainless steel, and gold, and different alloys of gold,” Ive said. (Hinting at future plans, Ive added, “We’ve not stopped.”) The product range could extend into mass-market luxury, allowing both Ive and Newson to escape the contrasting restrictions of their exalted careers. Newson became an acknowledged Apple contributor only last year, but he worked on the watch from the start; his name will appear on patents. Newson had designed airplane interiors, and the Safilo reading glasses that Ive often hooks over the collar of his T-shirts; but he had seldom made mass-market goods. He had sometimes been envious of what was possible at Apple. In 2007, in order to pursue the costly idea of milling one-off pieces of marble furniture, he had partnered with the Gagosian gallery, crossing the border into fine art. “I needed to find an outlet for my creativity,” Newson explained. “I couldn’t find a client who would do those kinds of things.” To work with Ive, at the other end of the manufacturing scale, would give him a similar license. A designer at Apple “can think about doing things in a way that you otherwise would have dismissed as being impractical or frivolous, or just not economical,” Newson said.
According to Clive Grinyer, “Jon’s always wanted to do luxury.” By this point, Grinyer said, Ive had already fulfilled one duty of industrial design: to design a perfect stapler, for everyone, in a world of lousy staplers. (Most designers driven by that philosophy “didn’t really rule the world,” Grinyer said. “They just ruled staplers.”) A few years ago, Grinyer had considered working with Vertu, the British-based cell-phone manufacturer, whose bejewelled but technologically ordinary products sell for tens of thousands of dollars. Vertu’s survival challenged the assumption that inevitable obsolescence removes modern consumer electronics from consideration as luxury goods. Ive was “very interested” in Vertu, Grinyer recalled.
“We just got back from Alaska, where we saw the cutest little glaciers.”
Bob Mansfield, then closely involved in the watch project, said that Ive’s role was to be “himself and Steve” combined. Yet Ive still had to make a case to Apple, and Mansfield recalled “a lot of resistance.” It wasn’t clear how the company would display such things in stores; there were also concerns about creating a divide between wealthy and less wealthy customers. (As Mansfield said, “Apple wants to build products for everybody.”) But Ive won the argument, and in 2013 the company announced the high-level appointments of Angela Ahrendts, the former C.E.O. of Burberry, and Paul Deneve, the former C.E.O. of the Yves Saint Laurent Group. Patrick Pruniaux, from tag Heuer, a part of the L.V.M.H. luxury conglomerate, was hired last year. Apple has announced that the cheapest watch will cost three hundred and forty-nine dollars. In parts of the world already filled with smartphones, that price may give the Apple Watch the graduation-gift appeal that, according to Brunner, Beats consciously sought with its headphone pricing. But Ive’s solid-gold models, innocently named Apple Watch Edition, are expected to cost many thousands of dollars. John Gruber, an influential Apple blogger, has written that the prices may be “shockingly high . . . from the perspective of the tech industry,” but perhaps “disruptively low from the perspective of the traditional watch and jewelry world.” Sebastian Vivas, the director of a watch museum maintained by Audemars Piguet, the Swiss manufacturer, recently described his industry as unperturbed by Apple’s plans: “We’re not afraid; we’re just a little bit smiling.” It would be a greater threat, he told me, if men widely accepted that they could wear gemstones without a time-keeping pretext.
Ive’s decision to offer choice was a challenge to Apple’s recurring theme of design inevitability. In one of our conversations, Ive was scathing about a rival’s product, after asking me not to name it: “Their value proposition was ‘Make it whatever you want. You can choose whatever color you want.’ And I believe that’s abdicating your responsibility as a designer.” Cook told me, “Jony has better taste than anyone I ever met in my life,” and Ive might not demur. Over lunch in an Apple cafeteria, Ive said that he wouldn’t think of challenging the technical decisions of “the best silicon-chip designers in the world,” who were sitting around us. But industrial designers, he said, are rarely offered the same deference—in part, because most people regularly make taste-based decisions, about shoes and lamps.
The studio adopted a modular system for the watch: a body in various materials, and a choice of interchangeable straps. Six weeks into the project, the studio built its first model.
“It’s awkward when you’re dealing with models,” Ive said. “Often you’re reacting, by definition, to newness, or difference.” The new has to be given time to annoy, or disappoint. A few years ago, Ive and his colleagues assessed each prototype size of the future iPhone 6 by carrying them around for days. “The first one we really felt good about was a 5.7,” he recalled. “And then, sleeping on it, and coming back to it, it was just ‘Ah, that’s way too big.’ And then 5.6 still seems too big.” (As Cook described that process, “Jony didn’t pull out of his butt the 4.7 and the 5.5.”)
For the watch, it was a year before Ive settled on straps that clicked into slots. Ive later tested watchbands by wearing them outside the studio with other watches. The shape of the body, meanwhile, barely changed: a rectangle with rounded corners. “When a huge part of the function is lists”—of names, or appointments—“a circle doesn’t make any sense,” Ive said. Its final form resembles one of Newson’s watches, and the Cartier Santos, from 1904.
Ive places the new watch in a history of milestone Apple products that were made possible by novel input devices: Mac and mouse; iPod and click wheel; iPhone and multitouch. A ridged knob on the watch’s right side—the Digital Crown—took its form, and its name, from traditional watchmaking. The watch was always expected to include a new technology that had long been in development at Apple: a touchscreen that sensed how hard a finger was pressing it. (A press and a tap could then have different meanings, like a click and a double-click.) But the Digital Crown, a device for zooming that compensated for the difficulty of pinching or spreading fingers on a tiny screen, was ordered up by the studio. In a reverse of “skinning,” Ive asked Apple’s engineers to make it. In time, the crown’s role grew to include scrolling through lists. Ive was delighted with its versatility, but the sight of one of his colleagues scrolling with a rigid finger—a Doughboy poke—made me wonder if a more natural watch-winding gesture will cause large thumbs to flop, accidentally, onto the touchscreen.
One afternoon in the studio, Ive sketched the Apple Watch as seen from the side, with the crown asymmetrical on two axes: nearer the top of the watch than the bottom, and nearer the face than the back. (There is also a more flush secondary button.) As an afterthought, he quickly drew the front of an iPod: a rectangle within a rectangle, and a circle within a circle. He pointed at the watch drawing. “It’s not for us to say if things are iconic,” he said, and then described it as a “very, very iconic view.” Ive explained that, had he centered the Digital Crown, the watch would be a quite different product. “It’s just literal. And you could say, ‘Why is that an issue?’ Well, if it’s literally referencing what’s happened in the past, the information about what it does is then wrong.” The crown rotates, which is reassuring, but it doesn’t wind the watch or adjust hands. The goal, Ive said, was to create “the strangely familiar.”
Apple was feeling its way toward a product for fitness monitoring, card-free payments, and flirtatious doodled messaging and wrist-tapping during long commutes. (The company may have used the word “intimate” one or two times too many at the product’s launch.) In 2012, Ive gathered small groups from across the company for a series of discussions at the St. Regis Hotel in San Francisco. Jeff Williams said, “Jony had this great way of facilitating ideas, and being incredibly patient—long moments of silence.” He remembered a conversation about the amount of information one can absorb in a glance. In another, it was observed that, although some modern cars can automatically alert a service center about a technical problem, a child’s looming illness creates no such alert.
When Ive took control of Human Interface, in 2012, his immediate task was reforming the iOS. Jobs had liked digital facsimiles of analog designs; reportedly, the stitched leather in Apple’s desktop calendar quoted the interior of his Gulfstream. Ive’s view was that such effects were appropriate for the iPhone’s launch, when “we were very nervous—we were concerned how people would make a transition from touching physical buttons that moved, that made a noise . . . to glass that didn’t move.” But, he went on, “It’s terribly important that you constantly question the assumptions you’ve made.” (The bulbous iMac, a design with a similar desire to put people at ease, was replaced after three and a half years, and looked dated before then.) Ive was also itching to smooth the corners of iPhone app icons. “They drove me crazy,” he said. “All I could see were these unresolved tangency breaks.”
Had Ive previously asked to intervene? “There’s a step prior to that, which is to say, ‘I don’t think this is right, but I’m really busy doing my stuff,’ ” he replied. He’d had that conversation with Jobs. “He knew, absolutely, my views,” Ive recalled. “I’m not going to second-guess what he would have done if—had he been well.” I asked Cook if, after he became C.E.O., Ive had pressed for a software role. “We clearly spent a lot of time talking about it,” Cook said. “And I think it became clear to him that he could add a lot.” Ive’s career sometimes suggests the movements of a man who, engrossed in a furrowed, deferential conversation, somehow backs onto a throne.
His discussions with Cook were prompted by thoughts of iOS7, but it would have been as clear to him as it was to Alan Dye, a creative director at Apple, that the company’s industrial designers were at risk of losing some of their control over its products. As an iPad “becomes a piece of glass,” Dye said recently, the experience of the software becomes as important as the hardware, “or more important.” The watch would include some grand industrial-design gestures—gold hardened in a novel process of compression; a buckle secured with forty-odd magnets—but across much of Apple’s product range such opportunities were becoming rarer.
Dye, a graphic designer who had worked at Kate Spade in New York, and then in Apple’s marketing and communications department, became the head of a new Human Interface team that, before it grew too large, was embedded in the studio. Apple, in fact, already had a Human Interface team, working on the other side of the campus, without the same access to Ive and sober Dutch ringtones. In a development that reflects some part of Apple’s evolution since Jobs’s death, there were moments of tension between the original team and the new sophisticates, and then there was one merged team, under Ive.
I spoke to Dye at a table by the lawn at Infinite Loop. He had brought a sketchbook, and he opened it to a page where he’d drawn simple outlines: shuttlecock, light bulb, thundercloud, tree. He had been imagining possible elements in a vocabulary of doodled messages for the Apple Watch. “This is silly stuff,” Dye said, describing the exercise of seeding a future language.
Last spring, Jimmy Iovine, the C.E.O. of Beats, asked to meet with Robert Brunner. As Brunner recalled, “He walks in, he says, ‘I sold the company!’ ” Iovine couldn’t then name the buyer; Brunner’s best guess was Samsung. When he learned that it was Apple, which had paid more than three billion dollars, he e-mailed Ive: “Well, we need to have dinner.” Brunner recalled that Ive, in his reply, referred to the “odd symmetry” of the moment.
When I spoke to Cook, he lauded Beats’ music-streaming service and its personnel before praising its hardware. “Would Jony have designed some of the products?” he said. “Obviously, you can look at them and say no.” He went on, “But you’re not buying it for what it is—you’re buying it for what it can be.” Brunner is proud of the Beats brand, but it took him time to adjust to a design rhythm set as if for a sneaker company: “Originally, I hated it—‘Let’s do a version in the L.A. Lakers’ colors!’ ” He laughed. “ ‘Great. Purple and yellow. Fantastic.’ ” When I asked Cook about such novelties, he laughed: “I want Beats to be true to who they are. I don’t want to wave the wand over them in a day and say, ‘You are now Apple.’ Down the road, we’ll see what happens.”
June 27, 2011
Brunner and Ive had dinner in San Francisco a few days before Apple’s September announcement; they barely talked about the Beats deal. “I was telling my wife I’ll be home by ten o’clock,” Brunner said. “We were still drinking past twelve-thirty. I think he was blowing off a little steam.” (Stephen Fry said of Ive, “He loves a great hotel and a great wine.”) Ive was worn out, and preoccupied by the launch, and, Brunner said, by the thought of “doing something like this without Steve.” But they gossiped a little about designers, and Brunner was reminded of his former employee’s extreme thoroughness when Ive showed him drawings of “a perfectly radiused marble corner” for a future bathroom in Pacific Heights.
The Apple event ended oddly, with charmless stage banter between Cook and Bono, who spoke coyly of a vast, opaque commercial transaction, involving free music, between their two organizations. Like Mickey Mouse, seen that day on one of the watch faces, U2 has perhaps become more a symbol of entertainment than a source of it. I imagined Ive sighing, “Must I do everything myself?”
As people stood to leave, Harper Alexander handed Ive an Apple Watch: it was the larger of two sizes, in rose gold, with a band of white rubbery plastic. Ive tied it to his wrist loosely, and it suited him. A few minutes later, he walked outside to a large white shed that had been built as a temporary showroom. There seemed to be an exaggerated heaviness—a miming of responsibility—in Ive’s rolling gait. Referring to three years of work on the watch, he said, “It took a long time and it was very hard.” But the ovations had pleased him. The room was full of reporters and fashion-industry guests—including Lily Cole, the model, wearing a gold Rolex Oyster that her friend Olivier Zahm, the studiedly louche editor of the magazine Purple, Instagrammed before the event was over. (“Sorry Apple,” someone commented.)
Inside the shed, I tried on a watch, and its stainless-steel chain bracelet, guided by magnets, fell into place with the click of someone stacking nickels. That click, and one or two other immaculate couplings, had been the only sounds, apart from music, heard on a trailer-length “reveal” video that preceded the ten-minute film. The watch was months away from market—it will become available in April—and its display showed only a loop of dummy text and images.
I was walking around with Richard Howarth and Julian Hönig; they stared, slightly dazed, at people handling objects that only they had handled for years. When a product demonstrator gave me his pitch, they interrupted with design footnotes. “The materials in this thing are insane,” Howarth said. People, he noted, were saying that the watch’s face was made of “sapphire glass”: “It’s not glass, it’s sapphire crystal—completely different structure. And then the stainless steel is super-hardened. And the zirconia ceramic on the back is co-finished with sapphire as well.” He added, “This would cost so much money if a different company was making it—Rolex or something. It would be a hundred grand or something.”
“We sell it for just fifty thousand,” Hönig said, joking.
The next day, I visited Ive in his studio. The table previously covered with a flat cloth was now uncovered: it was a glass-topped Apple Watch display cabinet, accessible to staff from below, via a descending, motorized flap, like the ramp at the rear of a cargo plane. Ive has begun to work with Ahrendts, Apple’s senior vice-president of retail, on a redesign—as yet unannounced—of the Apple Stores. These new spaces will surely become a more natural setting for vitrines filled with gold (and perhaps less welcoming, at least in some corners, to tourists and truants). Apple had not, overnight, become an élite-oriented company—and it would sell seventy-five million iPhones in the final quarter of 2014, many of them in China—but I wondered how rational, and pure of purpose, one can make the design of a V.I.P. area. Ive later told me that he had overheard someone saying, “I’m not going to buy a watch if I can’t stand on carpet.”
That afternoon, he was eating salmon sashimi, and complaining about seasonal allergies. “I’m going to limp toward the weekend, and take Monday off, I think,” he said. He described the previous day as “momentous.” His iPhone 6 softly chimed a text alert every minute or two. To those of Ive’s generation, the new phones were perhaps large and slippery enough to trigger nostalgia for the small, tough phones of a decade ago. I asked Ive about the slightly protruding camera lens that prevents the iPhone 6 from resting comfortably on its back. Ive referred to that decision—without which the phone would be slightly thicker—as “a really very pragmatic optimization.” One had to guess at the drama behind the phrase. “And, yeah . . .” he said.
As we spoke, I removed links from an Apple Watch bracelet, and then put them back, and it seemed possible that the watch’s combination of distractions might, for some, be overwhelming. “I know,” Ive said. Like an iPhone, an Apple Watch is only “simple and pure”—to quote Ive’s film—until it’s a threat to sleep, solitude, or the happiness of someone near you in a cinema. Michael Ive, remembering his son’s hamster obstacle course, wondered if young people were now “too screen-focussed.” On a sidewalk outside the studio, I later saw an employee looking at his Apple Watch while balancing an iPhone 6 on his forearm.
The Apple Watch is designed to remain dark until a wearer raises his or her arm. In the prototypes worn around the Cupertino campus at the end of last year, this feature was still glitchy. For Marc Newson, it took three attempts—an escalation of acting styles, from naturalism to melodrama—before his screen came to life. Under normal circumstances, the screen will then show one of nine watch faces, each customizable. One will show the time alongside a brightly lit flower, butterfly, or jellyfish; these will be in motion, against a black background. This imagery had dominated the launch, and Ive now explained his enthusiasm for it. He picked up his iPhone 6 and pressed the home button. “The whole of the display comes on,” he said. “That, to me, feels very, very old.” (The iPhone 6 reached stores two weeks later.) He went on to explain that an Apple Watch uses a new display technology whose blacks are blacker than those in an iPhone’s L.E.D. display. This makes it easier to mask the point where, beneath a glass surface, a display ends and its frame begins. An Apple Watch jellyfish swims in deep space, and becomes, Ive said, as much an attribute of the watch as an image. On a current iPhone screen, a jellyfish would be pinned against dark gray, and framed in black, and, Ive said, have “much less magic.”
Alan Dye later described to me the “pivotal moment” when he and Ive decided “to avoid the edge of the screen as much as possible.” This was part of an overarching ambition to blur boundaries between software and hardware. (It’s no coincidence, Dye noted, that the “rounded squareness” of the watch’s custom typeface mirrors the watch’s body.) The studio stopped short of banishing screen edges altogether, Dye said, “when we discovered we loved looking at photos on the watch, and you can’t not show the edge of a photo.” He laughed. “Don’t get me wrong, we tried! I could list a number of terrible ideas.” They attempted to blur edges, and squeeze images into circles. There was “a lot of vignetting”—the darkening of a photograph’s corners. “In the end, it was maybe putting ourselves first,” he said.
After I left Ive that day, he drove to a wine bar in San Francisco, for a celebratory Apple Watch buffet dinner. The evening, he recalled, was “very gentle, reflective, probably because we were so tired.” The Apple Watch software will award virtual medals, embossed and enamelled, marking fitness achievements; Ive described their appearance as “slightly nostalgic,” with echoes of a mid-century Olympic Games. “When you’re judicious with what’s literal, it can be powerful,” Ive said. At the party, what had been literal became manifest: the guests all left with a metal iteration of a virtual medal, in a black cloth pouch.
In San Francisco, in an L-shaped living room with a large fireplace surrounded by dark wood, Heather Ive turned off some lights to improve the night view. “You can see the wash of light from the lighthouse at Alcatraz,” she said. Her husband added, “The new house is way over there. You’re almost on top of the water.” The work in Pacific Heights, which has included driving piles forty feet into the ground, is scheduled to be finished this year.
His architects there are Foster + Partners, which is led by Norman Foster. Since 2009, the same firm—“Norman’s boys,” as Ive has sometimes put it—has worked on Apple’s new campus. Inevitably, Ive is a co-designer of his house; according to Cook, he is playing the same role with the new headquarters. Apple loves its architects, Cook said, but “you can’t outsource your brain.” The building should express “the way we look at the world.”
In December, a day after a severe coastal storm had sent seabirds darting inland, across Silicon Valley, I met Ive at the site of the future campus, a five-minute drive from Infinite Loop. It was still raining. There was no view of the Santa Cruz Mountains, and no sign of the drone that sometimes buzzes overhead, recording video that is scrutinized online. The site has been cleared of all but one preëxisting office building. This is where thirty Foster architects work; they are sometimes joined by London-based colleagues, and by Ive and his team. In the lobby, there was a wall-size rendering of the campus, into whose central landscaped circle—amphitheatre, fountain, apricot trees—one could drop the Great Pyramid. When the design studio is relocated, it will occupy a top-floor space of thirty thousand square feet, with Industrial Design and Human Interface together, sharing a view of what Apple refers to as the “savanna” between the main building and the fitness center.
“Will you quit listening to your ten all-time favorite albums and help me find some food!”October 17, 2011
“I was very keen to have Norman do the project,” Ive said. We walked through a series of rooms filled with prototypes and renderings. Ive has few doubts about his usefulness on architectural projects: in the design disciplines, he said, he finds it “a curious thing that we tend to compartmentalize, based on physical scale.” (He later told me that he’d taught Foster’s architects something about the geometry of corners. A recurring campus detail will be floors that turn up a little where they intersect with walls.)
We stood by a scale model. Ive said that, in an earlier iteration, the campus was “trilobal.” I imagined a three-petalled flower, or the symbol for radioactivity. The single loop seemed to reflect the imperial part of the studio’s spirit of imperial solicitousness. Under Cook, Apple has experimented with a softer, less neurotic image, and has, among other things, strived to improve its performance as a proxy employer of overseas factory workers. It’s determined to make the case, as Cook put it, that the company’s leaders shouldn’t be thought of as “greedy bastards looking for more money.” A private walled garden, costing an estimated five billion dollars, may not catch this mood.
Later that day, I asked Ive about an Apple design that shares the new campus’s formal simplicity: the circular “hockey puck” mouse that was included with the first iMacs. Many found it hard to control, and it is widely considered a design failure. Ive didn’t accept that description. He referred to different schools of thought about arms, wrists, and mice. “Everything we make I could describe as being partially wrong, because it’s not perfect,” he said, and he described the wave of public complaint that accompanies every release. He went on, “We get to do it again. That’s one of the things Steve and I used to talk about: ‘Isn’t this fantastic? Everything we aren’t happy about, with this, we can try and fix.’ ”
The loop can’t be fixed, as Ive acknowledged, with a laugh. But, as far as possible, Ive has turned it into an industrial-design product. From the point of view of his discipline, an office building is a handmade prototype that fails to go into production. And Ive sees no intrinsic virtue in making things by hand: “You can have careless, unqualified craftspeople.” So, if a vast unvarying loop could be thought of as a Jobs hangover, it’s also an opportunity for mass production. When Ive enthuses about the building, it’s on these grounds. “You have a kit of elements and you just make lots of them,” he said, happily. Ive’s studio largely designed the building’s “void slabs”: forty-four hundred precast-concrete units that will have a floor on one side, a ceiling on the other, and a cooling system between them. They are being manufactured in an Apple-built factory in Woodland, California. “We’re assembling rather than building,” Ive said.
Ive only then made the case that a ring was “a remarkably pragmatic way of connecting the right groups.” A taller building, he said, would make such connections more complex. The counterargument is fairly strong: the two full-circumference corridors are each about a mile long.
Before we went outside, Ive showed me the work he’d done on staircases, and on the signage for employee security-card readers; we examined brightly colored polycarbonate panels that will help people establish where, beneath the loop, they have parked. Pinned to a wall were alternate versions of a visitor reception center, separate from the loop. Seen from above, both were modified rectangles. One, marked “Pill,” had half-circles at either end. The other ended in a more familiar Apple way, and was labelled “iPhone.” “We should be done, but we’re still redoing and redoing,” Ive said. He had recently introduced the iPhone option, partly for fear that a visitor approaching the Pill by its rounded ends might mistake it for an echo of the main building. He had also insisted—“a big fight”—on simplifying the control panels of the Mitsubishi elevators.
We toured the site in a Jeep, in the rain. “Gosh, that’s come on so much,” Ive said. The building’s ring was a trench, lined with concrete, deep enough for two levels of underground parking. When we got out, Ive declined to wear the construction hat provided; we walked across mud and peered over the edge. His noises of appreciation—“Oh!”—sounded almost regretful.
He was a few days from starting a three-week vacation, the longest of his career. The past year had been “the most difficult” he’d experienced since joining Apple, he said later that day, explaining that the weariness I’d sometimes seen wasn’t typical. Since our previous meeting, he’d had pneumonia. “I just burnt myself into not being very well,” he said. He had discouraged the thought that Newson’s appointment portended his own eventual departure, although when I spoke to Powell Jobs she wondered if “there might be a way where there’s a slightly different structure that’s a little more sustainable and sustaining.” Comparing the careers of her husband and Ive, she noted that “very few people ever get to do such things,” but added, “I do think there’s a toll.”
We drove around the building’s perimeter. “This is something that Steve cared about passionately,” Ive said. “There is a bittersweetness here, because this is obviously about the future, but every time I come here it makes me think of the past as well—and just the sadness. I just wish he could have seen it.” We went to have lunch with Newson, in a twenty-thousand-square-foot room built as a miniature test run of the future campus cafeteria. ♦
0:11 So in 1885, Karl Benz invented the automobile.Later that year, he took it out for the first public test drive,and — true story — crashed into a wall.For the last 130 years,we’ve been working around that least reliable part of the car, the driver.We’ve made the car stronger.We’ve added seat belts, we’ve added air bags,and in the last decade, we’ve actually started trying to make the car smarterto fix that bug, the driver.
0:40 Now, today I’m going to talk to you a little bit about the differencebetween patching around the problem with driver assistance systemsand actually having fully self-driving carsand what they can do for the world.I’m also going to talk to you a little bit about our carand allow you to see how it sees the world and how it reacts and what it does,but first I’m going to talk a little bit about the problem.And it’s a big problem:1.2 million people are killed on the world’s roads every year.In America alone, 33,000 people are killed each year.To put that in perspective,that’s the same as a 737 falling out of the sky every working day.It’s kind of unbelievable.Cars are sold to us like this,but really, this is what driving’s like.Right? It’s not sunny, it’s rainy,and you want to do anything other than drive.And the reason why is this:Traffic is getting worse.In America, between 1990 and 2010,the vehicle miles traveled increased by 38 percent.We grew by six percent of roads,so it’s not in your brains.Traffic really is substantially worse than it was not very long ago.
1:49 And all of this has a very human cost.So if you take the average commute time in America, which is about 50 minutes,you multiply that by the 120 million workers we have,that turns out to be about six billion minuteswasted in commuting every day.Now, that’s a big number, so let’s put it in perspective.You take that six billion minutesand you divide it by the average life expectancy of a person,that turns out to be 162 lifetimesspent every day, wasted,just getting from A to B.It’s unbelievable.And then, there are those of us who don’t have the privilegeof sitting in traffic.So this is Steve.He’s an incredibly capable guy,but he just happens to be blind,and that means instead of a 30-minute drive to work in the morning,it’s a two-hour ordeal of piecing together bits of public transitor asking friends and family for a ride.He doesn’t have that same freedom that you and I have to get around.We should do something about that.
2:48 Now, conventional wisdom would saythat we’ll just take these driver assistance systemsand we’ll kind of push them and incrementally improve them,and over time, they’ll turn into self-driving cars.Well, I’m here to tell you that’s like me sayingthat if I work really hard at jumping, one day I’ll be able to fly.We actually need to do something a little different.And so I’m going to talk to you about three different waysthat self-driving systems are different than driver assistance systems.And I’m going to start with some of our own experience.
3:17 So back in 2013,we had the first test of a self-driving carwhere we let regular people use it.Well, almost regular — they were 100 Googlers,but they weren’t working on the project.And we gave them the car and we allowed them to use it in their daily lives.But unlike a real self-driving car, this one had a big asterisk with it:They had to pay attention,because this was an experimental vehicle.We tested it a lot, but it could still fail.And so we gave them two hours of training,we put them in the car, we let them use it,and what we heard back was something awesome,as someone trying to bring a product into the world.Every one of them told us they loved it.In fact, we had a Porsche driver who came in and told us on the first day,„This is completely stupid. What are we thinking?“But at the end of it, he said, „Not only should I have it,everyone else should have it, because people are terrible drivers.“So this was music to our ears,but then we started to look at what the people inside the car were doing,and this was eye-opening.Now, my favorite story is this gentlemanwho looks down at his phone and realizes the battery is low,so he turns around like this in the car and digs around in his backpack,pulls out his laptop,puts it on the seat,goes in the back again,digs around, pulls out the charging cable for his phone,futzes around, puts it into the laptop, puts it on the phone.Sure enough, the phone is charging.All the time he’s been doing 65 miles per hour down the freeway.Right? Unbelievable.So we thought about this and we said, it’s kind of obvious, right?The better the technology gets,the less reliable the driver is going to get.So by just making the cars incrementally smarter,we’re probably not going to see the wins we really need.
4:59 Let me talk about something a little technical for a moment here.So we’re looking at this graph, and along the bottomis how often does the car apply the brakes when it shouldn’t.You can ignore most of that axis,because if you’re driving around town, and the car starts stopping randomly,you’re never going to buy that car.And the vertical axis is how often the car is going to apply the brakeswhen it’s supposed to to help you avoid an accident.Now, if we look at the bottom left corner here,this is your classic car.It doesn’t apply the brakes for you, it doesn’t do anything goofy,but it also doesn’t get you out of an accident.Now, if we want to bring a driver assistance system into a car,say with collision mitigation braking,we’re going to put some package of technology on there,and that’s this curve, and it’s going to have some operating properties,but it’s never going to avoid all of the accidents,because it doesn’t have that capability.But we’ll pick some place along the curve here,and maybe it avoids half of accidents that the human driver misses,and that’s amazing, right?We just reduced accidents on our roads by a factor of two.There are now 17,000 less people dying every year in America.
6:01 But if we want a self-driving car,we need a technology curve that looks like this.We’re going to have to put more sensors in the vehicle,and we’ll pick some operating point up herewhere it basically never gets into a crash.They’ll happen, but very low frequency.Now you and I could look at this and we could argueabout whether it’s incremental, and I could say something like „80-20 rule,“and it’s really hard to move up to that new curve.But let’s look at it from a different direction for a moment.So let’s look at how often the technology has to do the right thing.And so this green dot up here is a driver assistance system.It turns out that human driversmake mistakes that lead to traffic accidentsabout once every 100,000 miles in America.In contrast, a self-driving system is probably making decisionsabout 10 times per second,so order of magnitude,that’s about 1,000 times per mile.So if you compare the distance between these two,it’s about 10 to the eighth, right?Eight orders of magnitude.That’s like comparing how fast I runto the speed of light.It doesn’t matter how hard I train, I’m never actually going to get there.So there’s a pretty big gap there.
7:10 And then finally, there’s how the system can handle uncertainty.So this pedestrian here might be stepping into the road, might not be.I can’t tell, nor can any of our algorithms,but in the case of a driver assistance system,that means it can’t take action, because again,if it presses the brakes unexpectedly, that’s completely unacceptable.Whereas a self-driving system can look at that pedestrian and say,I don’t know what they’re about to do,slow down, take a better look, and then react appropriately after that.
7:38 So it can be much safer than a driver assistance system can ever be.So that’s enough about the differences between the two.Let’s spend some time talking about how the car sees the world.
7:48 So this is our vehicle.It starts by understanding where it is in the world,by taking a map and its sensor data and aligning the two,and then we layer on top of that what it sees in the moment.So here, all the purple boxes you can see are other vehicles on the road,and the red thing on the side over there is a cyclist,and up in the distance, if you look really closely,you can see some cones.Then we know where the car is in the moment,but we have to do better than that: we have to predict what’s going to happen.So here the pickup truck in top right is about to make a left lane changebecause the road in front of it is closed,so it needs to get out of the way.Knowing that one pickup truck is great,but we really need to know what everybody’s thinking,so it becomes quite a complicated problem.And then given that, we can figure out how the car should respond in the moment,so what trajectory it should follow, how quickly it should slow down or speed up.And then that all turns into just following a path:turning the steering wheel left or right, pressing the brake or gas.It’s really just two numbers at the end of the day.So how hard can it really be?
8:49 Back when we started in 2009,this is what our system looked like.So you can see our car in the middle and the other boxes on the road,driving down the highway.The car needs to understand where it is and roughly where the other vehicles are.It’s really a geometric understanding of the world.Once we started driving on neighborhood and city streets,the problem becomes a whole new level of difficulty.You see pedestrians crossing in front of us, cars crossing in front of us,going every which way,the traffic lights, crosswalks.It’s an incredibly complicated problem by comparison.And then once you have that problem solved,the vehicle has to be able to deal with construction.So here are the cones on the left forcing it to drive to the right,but not just construction in isolation, of course.It has to deal with other people moving through that construction zone as well.And of course, if anyone’s breaking the rules, the police are thereand the car has to understand that that flashing light on the top of the carmeans that it’s not just a car, it’s actually a police officer.Similarly, the orange box on the side here,it’s a school bus,and we have to treat that differently as well.
9:49 When we’re out on the road, other people have expectations:So, when a cyclist puts up their arm,it means they’re expecting the car to yield to them and make room for themto make a lane change.And when a police officer stood in the road,our vehicle should understand that this means stop,and when they signal to go, we should continue.
10:08 Now, the way we accomplish this is by sharing data between the vehicles.The first, most crude model of thisis when one vehicle sees a construction zone,having another know about it so it can be in the correct laneto avoid some of the difficulty.But we actually have a much deeper understanding of this.We could take all of the data that the cars have seen over time,the hundreds of thousands of pedestrians, cyclists,and vehicles that have been out thereand understand what they look likeand use that to infer what other vehicles should look likeand other pedestrians should look like.And then, even more importantly, we could take from that a modelof how we expect them to move through the world.So here the yellow box is a pedestrian crossing in front of us.Here the blue box is a cyclist and we anticipatethat they’re going to nudge out and around the car to the right.Here there’s a cyclist coming down the roadand we know they’re going to continue to drive down the shape of the road.Here somebody makes a right turn,and in a moment here, somebody’s going to make a U-turn in front of us,and we can anticipate that behavior and respond safely.
11:04 Now, that’s all well and good for things that we’ve seen,but of course, you encounter lots of things that you haven’tseen in the world before.And so just a couple of months ago,our vehicles were driving through Mountain View,and this is what we encountered.This is a woman in an electric wheelchairchasing a duck in circles on the road. (Laughter)Now it turns out, there is nowhere in the DMV handbookthat tells you how to deal with that,but our vehicles were able to encounter that,slow down, and drive safely.Now, we don’t have to deal with just ducks.Watch this bird fly across in front of us. The car reacts to that.Here we’re dealing with a cyclistthat you would never expect to see anywhere other than Mountain View.And of course, we have to deal with drivers,even the very small ones.Watch to the right as someone jumps out of this truck at us.And now, watch the left as the car with the green box decideshe needs to make a right turn at the last possible moment.Here, as we make a lane change, the car to our left decidesit wants to as well.And here, we watch a car blow through a red lightand yield to it.And similarly, here, a cyclist blowing through that light as well.And of course, the vehicle responds safely.And of course, we have people who do I don’t know whatsometimes on the road, like this guy pulling out between two self-driving cars.You have to ask, „What are you thinking?“(Laughter)
12:27 Now, I just fire-hosed you with a lot of stuff there,so I’m going to break one of these down pretty quickly.So what we’re looking at is the scene with the cyclist again,and you might notice in the bottom, we can’t actually see the cyclist yet,but the car can: it’s that little blue box up there,and that comes from the laser data.And that’s not actually really easy to understand,so what I’m going to do is I’m going to turn that laser data and look at it,and if you’re really good at looking at laser data, you can seea few dots on the curve there,right there, and that blue box is that cyclist.Now as our light is red,the cyclist’s light has turned yellow already,and if you squint, you can see that in the imagery.But the cyclist, we see, is going to proceed through the intersection.Our light has now turned green, his is solidly red,and we now anticipate that this bike is going to come all the way across.Unfortunately the other drivers next to us were not paying as much attention.They started to pull forward, and fortunately for everyone,this cyclists reacts, avoids,and makes it through the intersection.And off we go.
13:25 Now, as you can see, we’ve made some pretty exciting progress,and at this point we’re pretty convincedthis technology is going to come to market.We do three million miles of testing in our simulators every single day,so you can imagine the experience that our vehicles have.We are looking forward to having this technology on the road,and we think the right path is to go through the self-drivingrather than driver assistance approachbecause the urgency is so large.In the time I have given this talk today,34 people have died on America’s roads.
13:55 How soon can we bring it out?Well, it’s hard to say because it’s a really complicated problem,but these are my two boys.My oldest son is 11, and that means in four and a half years,he’s going to be able to get his driver’s license.My team and I are committed to making sure that doesn’t happen.
14:13 Thank you.
14:15 (Laughter) (Applause)Chris Anderson: Chris, I’ve got a question for you.
14:22 Chris Urmson: Sure.
14:25 CA: So certainly, the mind of your cars is pretty mind-boggling.On this debate between driver-assisted and fully driverless —I mean, there’s a real debate going on out there right now.So some of the companies, for example, Tesla,are going the driver-assisted route.What you’re saying is that that’s kind of going to be a dead endbecause you can’t just keep improving that route and get to fully driverlessat some point, and then a driver is going to say, „This feels safe,“and climb into the back, and something ugly will happen.
14:58 CU: Right. No, that’s exactly right, and it’s not to saythat the driver assistance systems aren’t going to be incredibly valuable.They can save a lot of lives in the interim,but to see the transformative opportunity to help someone like Steve get around,to really get to the end case in safety,to have the opportunity to change our citiesand move parking out and get rid of these urban craters we call parking lots,it’s the only way to go.
15:20 CA: We will be tracking your progress with huge interest.Thanks so much, Chris. CU: Thank you.
If you needed just one more reason to trash your iPhone, this is it. Apple co-founder Steve Wozniak recently told a crowd of techies in Austin, Texas, that the future of humanity will predicate on artificially-intelligent (AI) robots keeping people as „pets“ – and Wozniak says he’s actually looking forward to this grim, robot-dominated future.
Building upon Apple’s „Siri“ concept, which is AI in its infancy, Wozniak’s vision for 100 years from today is that humans will be literally owned by AI robots, much like how humans currently own dogs or cats. Robots will be in charge, in other words, and humans will be their slaves. And all of this will somehow be „really good for humans,“ in Wozniak’s view.
Speaking at the Freescale Technology Forum 2015, Wozniak told eager listeners that putting robots in charge is a good thing because, by that point (100 years from now), they’ll have the capacity to become good stewards of nature, „and humans are part of nature,“ he says. Expressing comfort by this thought, Wozniak stated that he „got over [his] fear“ of becoming a robot slave.
„Computers are going to take over from humans, no question,“ Wozniak told the Australian Financial Review during a recent interview, affirming what many others in the tech industry, including Tesla CEO Elon Musk, believe will commence once AI technology really gets off the ground.
Since Wozniak treats his own dogs „really nice,“ he says he isn’t concerned about AI robots taking over
Echoing the concerns of Musk, Microsoft founder Bill Gates, physicist Stephen Hawking, and others, Wozniak does acknowledge some of the risks involved with developing AI technologies. But these risks aren’t necessarily a deal breaker because AI robots, in his view, will probably treat humans kindly just like most people treat their own pets.
„Will we be the gods? Will we be the family pets? Or will we be ants that get stepped on? I don’t know about that,“ he stated. „But when I got that thinking in my head about if I’m going to be treated in the future as a pet to these smart machines … well I’m going to treat my own pet dog really nice.“
Well, phew! It’s all settled then. Because Wozniak happens to be kind to his own dog, it’s perfectly fine, in his view, to unleash an army of advanced robots that are „smarter“ than humans and capable of destroying them because maybe they’ll choose instead to be kind to humans.
Wozniak: Let’s just unleash AI robots in order to find out how they’ll treat humans
It’s a lot like the infamously absurd words of House Minority leader Nancy Pelosi, who stated prior to voting for Obamacare that „we have to pass the bill so that you can find out what is in it.“ Concerning AI robots, Wozniak’s message is essentially the same: We just have to create them first in order to find out what they’ll do to humanity.
But if a recent „Google Brain“ study is any indicator of how AI robots think, humans would be lucky to be treated as kindly as a family pet. An experimental AI robot „interviewed“ by Google researchers revealed that such technology is both amoral and hostile to humans. When asked „what is immoral?“ the robot responded, „the fact that you have a child,“ expressing enmity against human reproduction.
You can read the full paper here: Neural Conversational Model
„Everyone on the planet has much to fear from the unregulated development of super-intelligent machines,“ stated James Barrat, a documentary filmmaker and author of the book Our Final Invention: Artificial Intelligence and the End of the Human Era, during a recent interview with Smithsonian. „They will be machines that kill, unsupervised by humans.“
With Wednesday’s layoffs, Microsoft, saddled with the losing mobile hand that is Windows Phone, has essentially folded. The bulk of the 7,800 people let go are from the company’s phone division, a tacit admission that its big plans for Windows Phone haven’t exactly worked out.
The company’s not leaving the casino, though: Windows Phone, the platform, isn’t going anywhere, even as Microsoft greatly scales back its hardware ambitions. The company has labored for years to create both a full-featured mobile operating system as well as an ecosystem of devices — PC, phone, tablet and more — that all use the same code base. It would be silly to just abandon its mobile platform, especially as people spend more and more of their time on smartphones.
In fact, if you’re not one of the 7,800 people losing their jobs, there’s actually a lot to like in Satya Nadella’s explanation: Microsoft will continue to build Windows Lumia handsets, but only three types: flagships, business-focused enterprise phones and low-end budget devices.
They’re retreating from being a mainstream player
They’re retreating from being a mainstream player,“ says Martin Reynolds, vice president at Gartner Research. „They’ll continue to bring products to market, but not particularly aggressively.“The move represents a clear refocusing, putting Microsoft’s phones in the arenas where they might actually score a few punches before Android and the iPhone walk away with all the market share. It also rightly ditches the current strategy of offering several different Lumias, each with region-specific models, which led to a muddled brand and a confusing market strategy message to consumers.
Retreating forward
Even without the model shake-up, trimming the fat on the handset business Microsoft acquired from Nokia was probably inevitable. With a few exceptions (hello, curved screens), smartphone design and technology have more or less plateaued — it’s no coincidence that both iOS and Android have essentially taken a „bye“ in 2015, with few feature updates. Big hardware teams aren’t really needed to build good smartphones in 2015, as illustrated by upstart Chinese companies like Xiaomi and OnePlus.
„Things have changed in the last few years,“ says Reynolds. „You don’t have [to be a] big company to run a small phone business. They certainly don’t need the design teams and manufacturing people going forward.“
Still, there are new Lumias — and certainly a new flagship — coming soon. A couple of months after Windows 10 debuts, Windows 10 for phones will arrive, and, as Nadella suggested in his letter to employees, those phones will emphasize the big differentiators in the Windows ecosystem. Commentators like Daniel Rubino at Windows Central almost have you believing that a leaner-and-meaner Microsoft mobile division will be poised to succeed, albeit with lowered expectations, once Windows 10 is fully formed.
Almost.
Let me get this straight, Microsoft *finally* focusing on enterprise for Windows Phone is a bad thing? Should have happened 4 years ago.
That point of view overlooks the crux of the matter: Windows Phone’s fate was never in the hands of Microsoft. What the company does in mobile at this point is virtually irrelevant. It designed a beautiful (and influential!) user interface, offered sweeter deals to developers than competitors, and helped engineer some of the most sophisticated cameras ever seen on mobile.
None of it mattered. Developers and consumers didn’t respond, locked in a deadly catch-22: If the apps weren’t there, consumers wouldn’t buy the phones; if there weren’t enough people on the platform, developers wouldn’t bother creating apps.
„Windows Phone is not even a blip on [developers‘] radar,“ says Richard Hay, a longtime Microsoft observer and contributor to SuperSite for Windows. „They’re not going to start flocking to it, because what’s the draw? You’re still going to have the app gap.“
The „app gap“ ultimately dug Windows Phone’s grave, and even though it’s only got one foot in it, today’s news will be widely perceived as an admission that the other will soon follow. If there were other Windows Phone manufacturers, it might be a different story, but Microsoft makes 97% of the Windows Phones being sold, according to Ad Duplex. If they’re scaling back, who’s going to step up?
Windows 10 and mobile
If there’s a way Microsoft can resuscitate Windows Phone, it’s with Windows 10. Its ecosystem strategy doesn’t depend on it, but with the new OS, Windows Phones will be more connected to the platform than before, sharing all the same code and development tools.
„The universal Windows platform helps,“ says Hay. „Will that persuade developers to develop for handsets and smaller tablets? Is it enough to come back from the edge? i’m just not sure it is.“
That means Windows developers will be able to create Windows Phone versions of their apps with minimal effort, and some of Windows Phone’s key differentiators, like Cortana, will get a chance to shine on PCs, which could ultimately have a positive impact on the platform.
Finally, there’s Continuum — the feature that allows Windows apps to adapt from PC to tablet to phone seamlessly and lets a Windows Phone theoretically act as your PC when it’s plugged into an external screen. And although there will always be performance concerns when trying to do PC with a mobile processor, it’s a pretty cool trick.
Continuum, though, has only the slimmest chance of being the ace in the hole that wins the day — any day — for Windows Phone. Even for enterprise customers, it’s hard to picture any of Windows 10’s differentiators winning over users, especially now that we’re firmly in a BYOD and single-device world.
Even if Continuum ends up being an X factor, who’s left to give Windows Phones a chance?
Even if Continuum ends up being an X factor, who’s left to give Windows Phones a chance? Microsoft is certainly hoping today’s belt-tightening and the Windows 10 launch will lead to some kind of success in mobile, albeit on redefined terms. But it’s not acting in a vacuum. Today’s retreat — or rather the perception of it — may have sealed Windows Phone’s fate. Who would believe the recommendation of a Windows handset after today?Without those new users, developers will have even less incentive to create apps. And without those experiences, Windows Phone will be even more of shell than it is now. What then?
It’s admirable that Microsoft is taking painful steps to preserve what it’s built, but it’s hard not to see its Windows Phone restructuring as delaying the inevitable. Yes, by reducing its ambitions, it’s no longer losing on big bets. But in mobile, there really isn’t a low-stakes table.
One of the drones used in Nokia’s network testing. Image: Nokia
Nokia has showed off how it plans to use drones to replace some of the inspection and maintenance work on cell towers which is currently done by human technicians.
Amazon hopes drones will one day be used to bring packages to Prime customers, free from the constraints of road traffic and costly human delivery drivers. In the same vein, postal services in France and Switzerland have launched drone trials to see whether the unmanned aerial vehicles could be used to deliver the post in the next five years.
Now Nokia is examining whether it should require human technicians to climb cell towers to inspect them when a drone can do the job faster and without the risk of falling.
For a recent trial of the drones, Nokia teamed up with operator du in the United Arab Emirates. While inspecting the towers, the drones carried smartphones to help with radio planning and line of sight testing between radio towers.
The proof of concept was conducted in the contained environment of the Dubai International Stadium, a sports stadium that seats 25,000 people.
According to Nokia, its telco drones offered a number of advantages over humans, including covering manual walk tests faster than humans. Thanks to a network testing app installed on the smartphones which the drones carried, they were able to automatically send test data for processing at Nokia’s global delivery centre.
The drones could be used to cut down the frequency of technicians climbing up and down a telecoms tower, which Nokia says can be very dangerous in bad weather conditions. In addition, with a single passover the drones could generate a panoramic view of the lattice tower and offer the potential to remotely monitor installations.
The drones were useful for helping engineers design the network, and detecting if trees interfered with a frequency being used, determining power requirements, and latency simulation.
Nokia and its partners employed Secutronic INSPIRE1 drones for network optimisation at the stadium and MICRODRONES d4-1000 models for tower inspection, line of sight testing, and radio site planning.
Nokia isn’t the first to think of drones for network maintenance. Fluke Networks last year launched a drone edition of its Wireless Work Advisor with a focus on safety and efficiency.


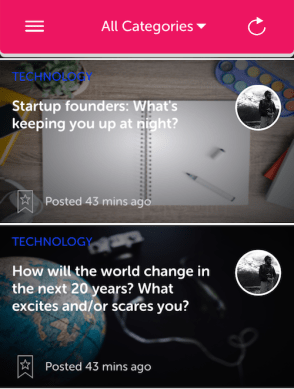 Once you fill out a brief profile blurb, SayMore gives you a curated list of things to talk about. Some examples include:
Once you fill out a brief profile blurb, SayMore gives you a curated list of things to talk about. Some examples include: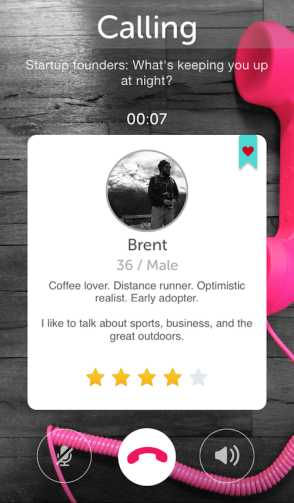 “We do think that humans are social creatures by nature,” Brent says. SayMore is there “Anytime they want to have a deeper connection rather than posting a status update where people might just Like it or retweet it, but there isn’t a dialogue that takes place.” He concludes, “the current social networks are more broadcast platforms.”
“We do think that humans are social creatures by nature,” Brent says. SayMore is there “Anytime they want to have a deeper connection rather than posting a status update where people might just Like it or retweet it, but there isn’t a dialogue that takes place.” He concludes, “the current social networks are more broadcast platforms.”